GITAI Inchworm Robot
Overview
GITAI is proud to introduce our latest innovation in robotics technology – the inchworm robot. Designed specifically for use in space stations and satellites, this versatile robot is packed with features that make it an essential tool for a wide range of tasks in micro-gravity environments.
At its core, the inchworm robot is a powerful and reliable solution for maintenance, repairs, and scientific experiments in space. But what sets it apart from other robotics solutions is its unique modular design, which offers a range of benefits and features that make it an ideal choice for space operations.
Modular Design
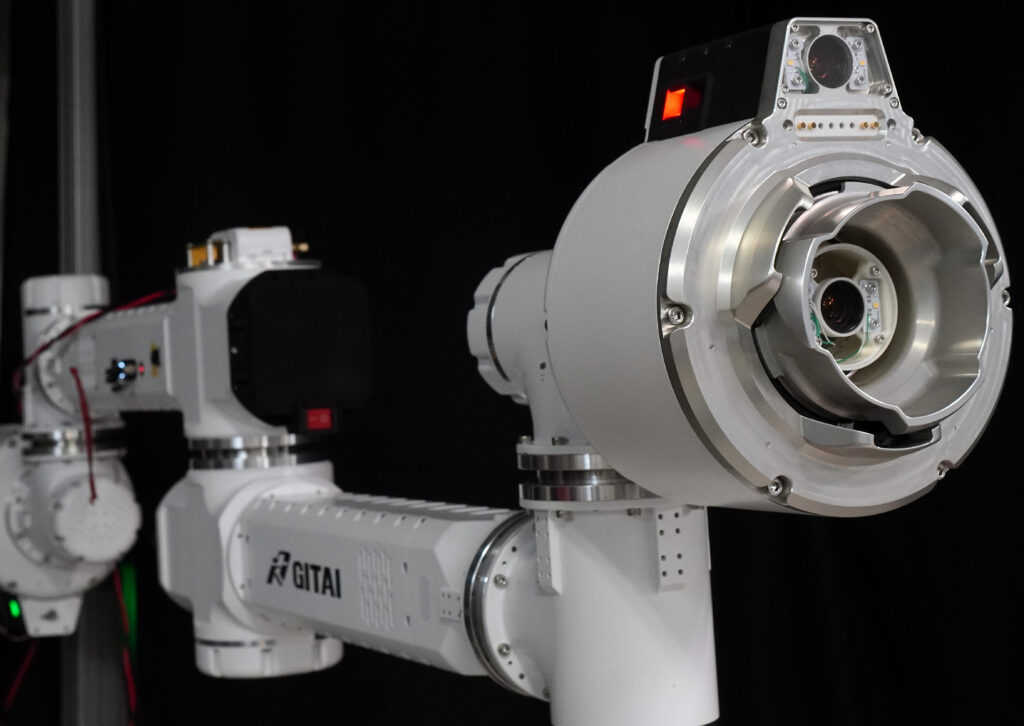
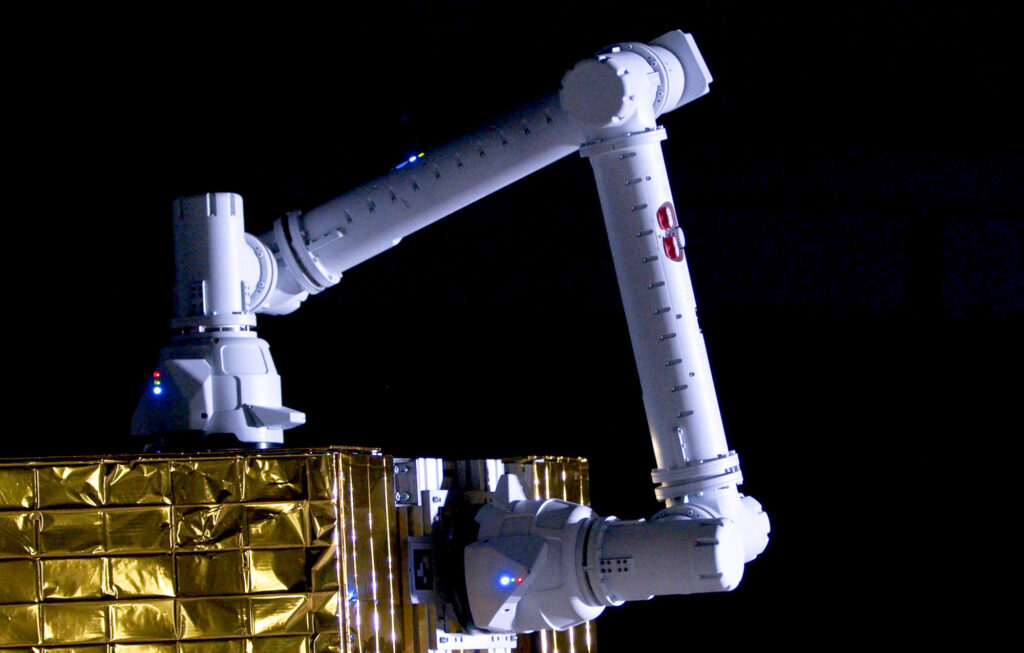
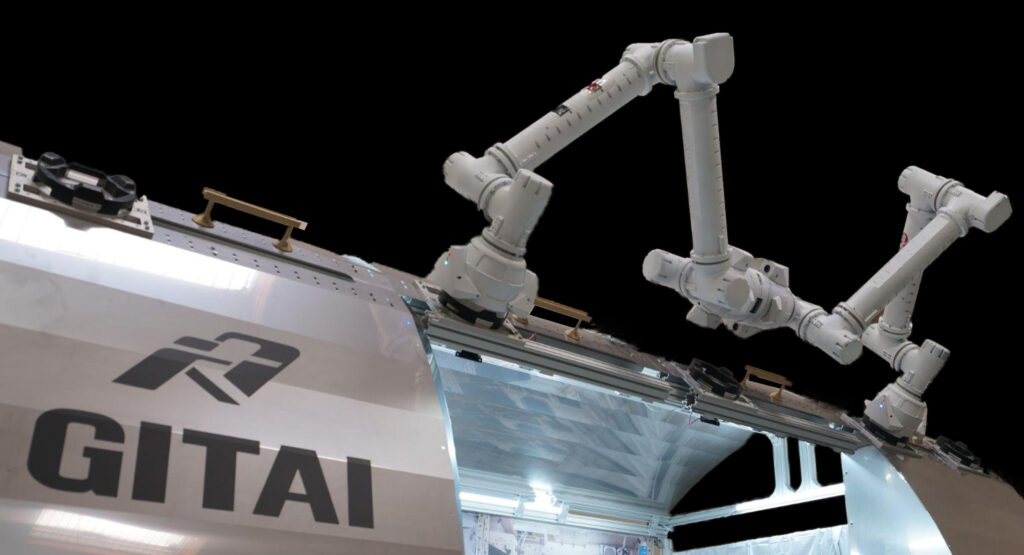
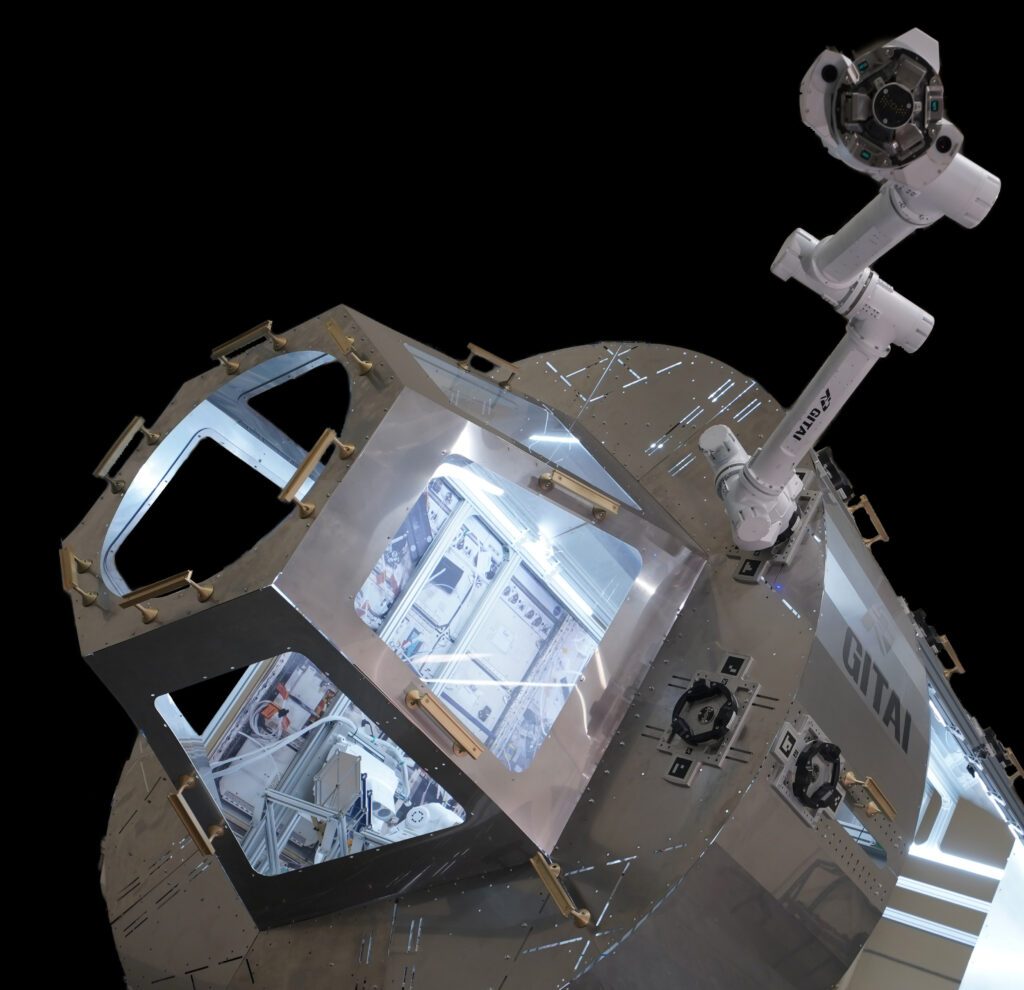
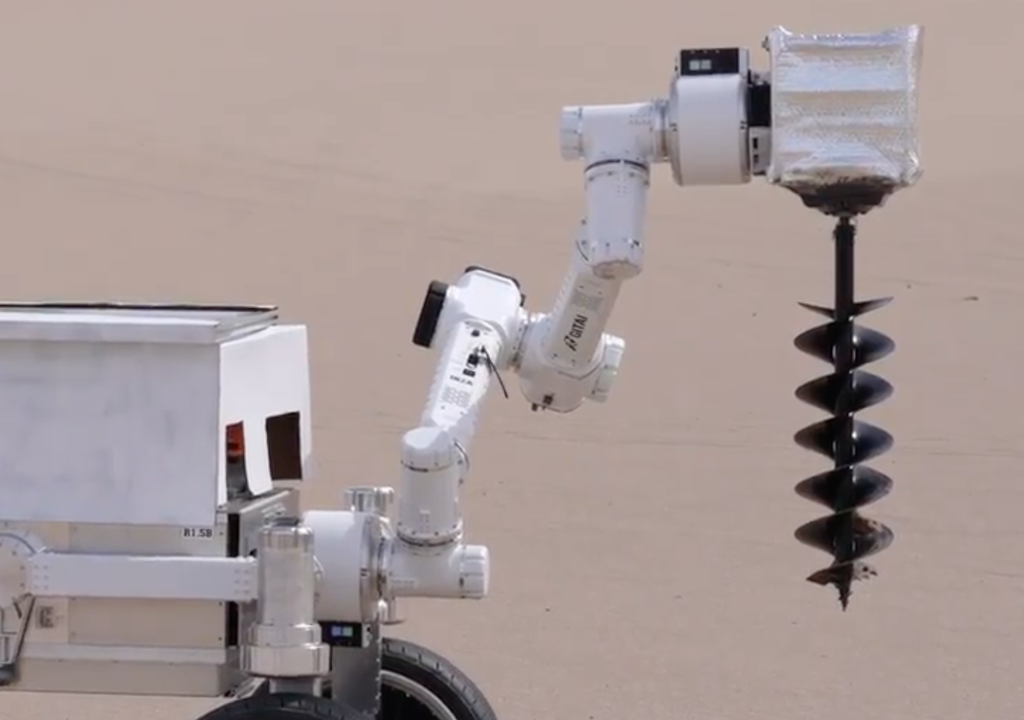
One of the standout features of our inchworm robot is its grapple end-effectors, which are located on both ends of the arm. This allows the robot to perform a variety of general-purpose tasks, such as docking spacecraft, manipulating payload, and inspect & repair, with high precision.
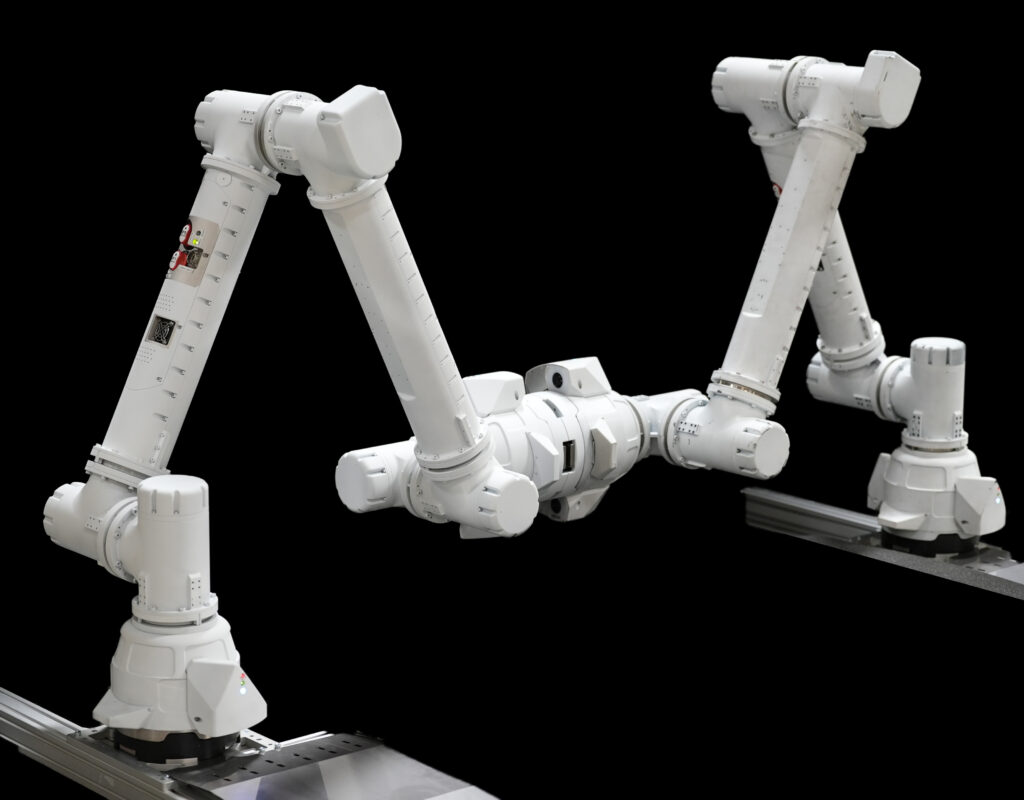
The arm itself is 2 m long with 7 degrees of freedom, providing ample reach and flexibility for a wide range of applications. But if you need even more reach, you can connect two inchworm robots together to create a longer arm, providing even more versatility in its use.
Autonomus & Teleoperation
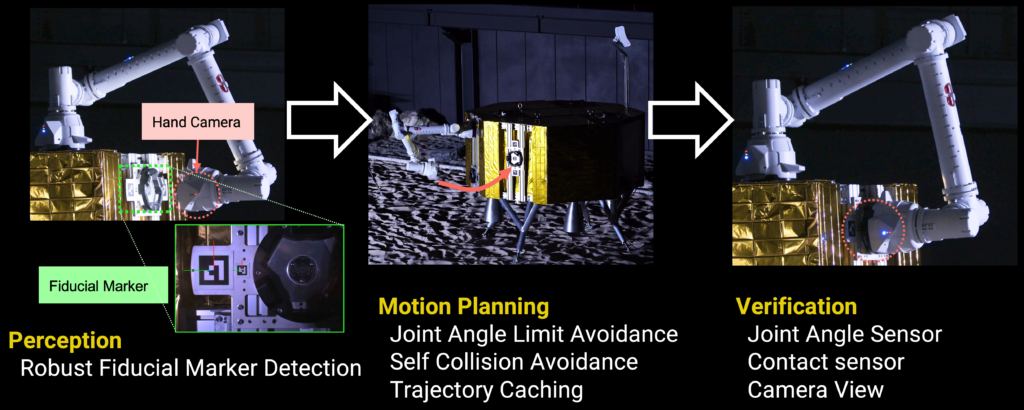
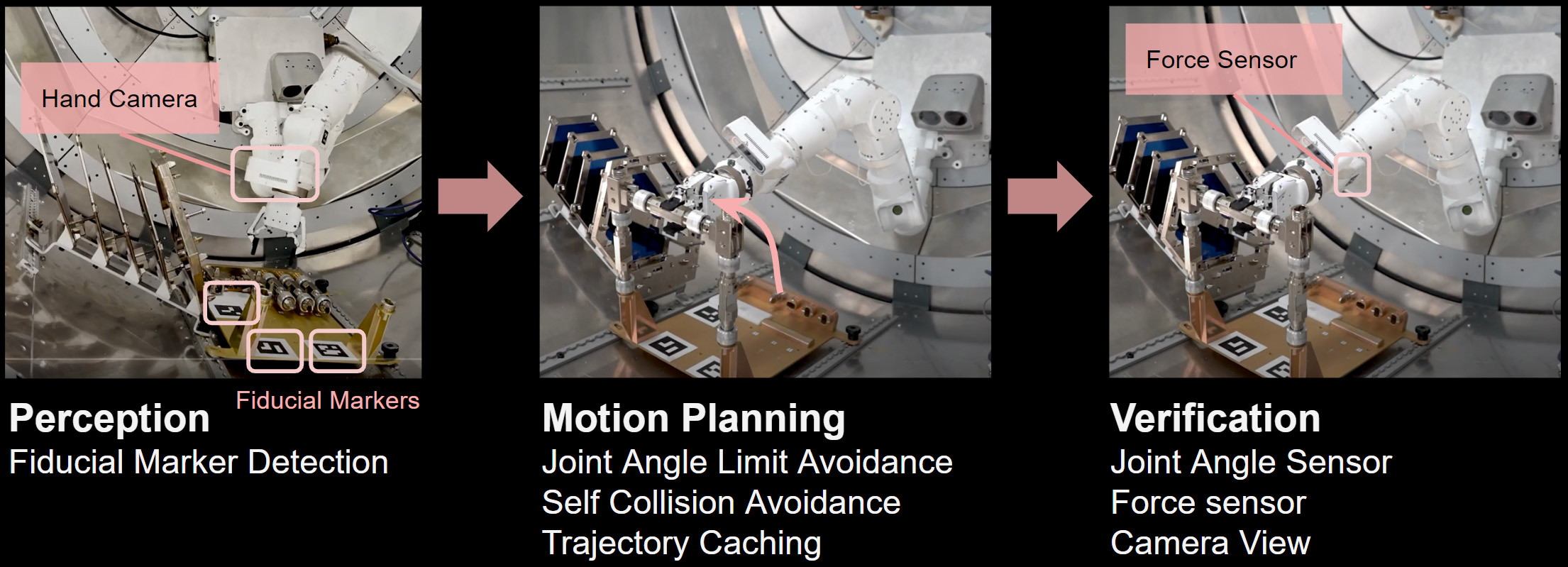
At the core of the inchworm robot’s design is its unique balance of autonomy and human supervision. The inchworm robot is primarily autonomously controlled with advanced sensors, efficiently navigating and performing complex tasks. However, in every critical checkpoint, the arm utilizes a “human-in-the-loop” system, allowing operators to make informed decisions, and ensuring the success and safety of each mission. These tasks are conducted semi-autonomously based on GITAI’s original software such as:
- Perception with robust fiducial makers,
- Motion planning with trajectory caching
- Verification using an image sensor and mechanical sensors.
If you need to take control, you can do so remotely, using our remote control interface. We believe that combining human-operated teleoperation and AI-driven autonomous systems is a pragmatic approach to building a moon base. By integrating both teleoperation and autonomous systems, we can leverage the flexibility of human intelligence along with the precision and repeatability of an autonomous system.
High Quality & Cost performance
Perhaps the most impressive thing about our inchworm robot, however, is its cost performance. Our solution outperforms our competitors’ offerings while being more affordable, making it an ideal choice for businesses and organizations that need to get the most out of their investments. The modular design also contributes to increasing the cost performance. For example, even if the 15m-long arm is damaged, you just simply replace a single segment, instead of an entire 15m-length arm.
We will do the EVR mission on ISS this autumn, and achieve NASA’s Technology Readiness Level 7 (confirmation of the feasibility of the technology as a system in space). With the development phase complete, our inchworm robot is ready to be shipped to space stations and satellites around the world. Whether you need a reliable tool for maintenance, repairs, or scientific experiments in space, our inchworm robot is the perfect solution.
Gallery



{kind=link}