ISAM Services
GITAI supports ISAM Tasks
The significance of ISAM (In-space Servicing, Assembly, and Manufacturing) services is rapidly increasing. Recent commercial operations have extended the lifetime of satellites that are low on fuel, which support sustained economic activity and human presence in space. An autonomous robotic arm has an essential role during docking operations to a client object. Also, if the robotic arm has a tool-changing capability, it can conduct multiple tasks in one unit. GITAI has a full lineup of robotic arms from 1m to 10m, and every robotic arm has a tool changer to conduct various on-orbit servicing such as refueling, inspection, assembly, and manufacturing for satellites and any space object.
One example of our non-satellite services is space debris removal to protect space assets. This enables entities to maintain reliable satellite systems while avoiding disruptive satellite maneuvering or costly replacement. The above video shows a ground experiment of GITAI’s robotics arm for debris capture.
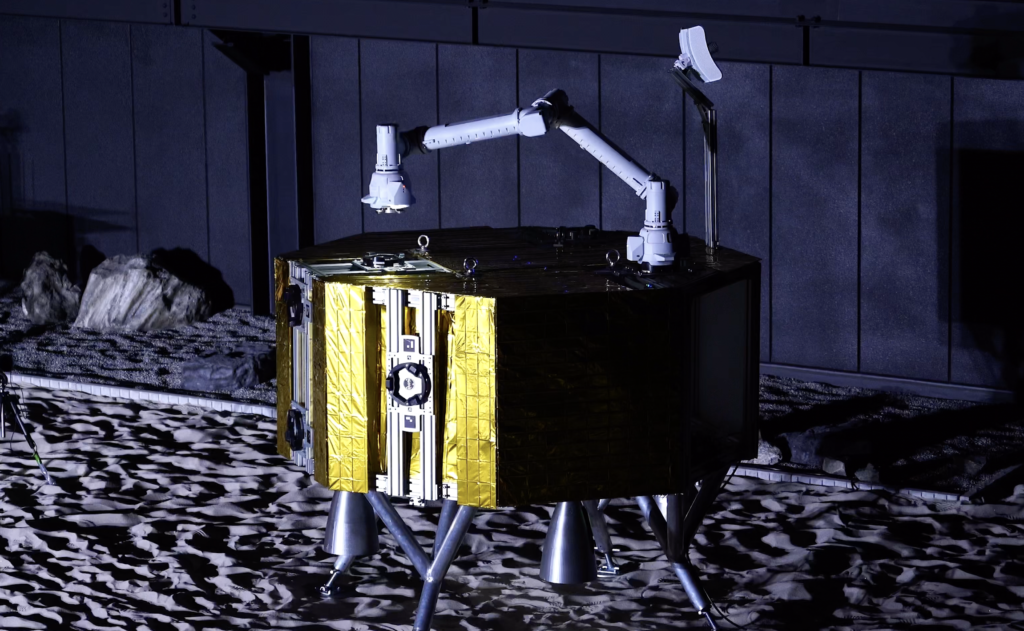
Allow us to present another demonstration of our robot’s capabilities. The following video showcases GITAI’s autonomous robot performing ISAM activities inside JAXA’s Tsukuba Space Center’s 8-meter Thermal Vacuum Chamber (TVAC). The robot successfully executes assembly tasks, such as the construction of a solar panel, and Orbital Replacement Unit (ORU) exchange tasks, all performed autonomously. The system also completed a 14-hour endurance test flawlessly, underlining its reliability and high performance.
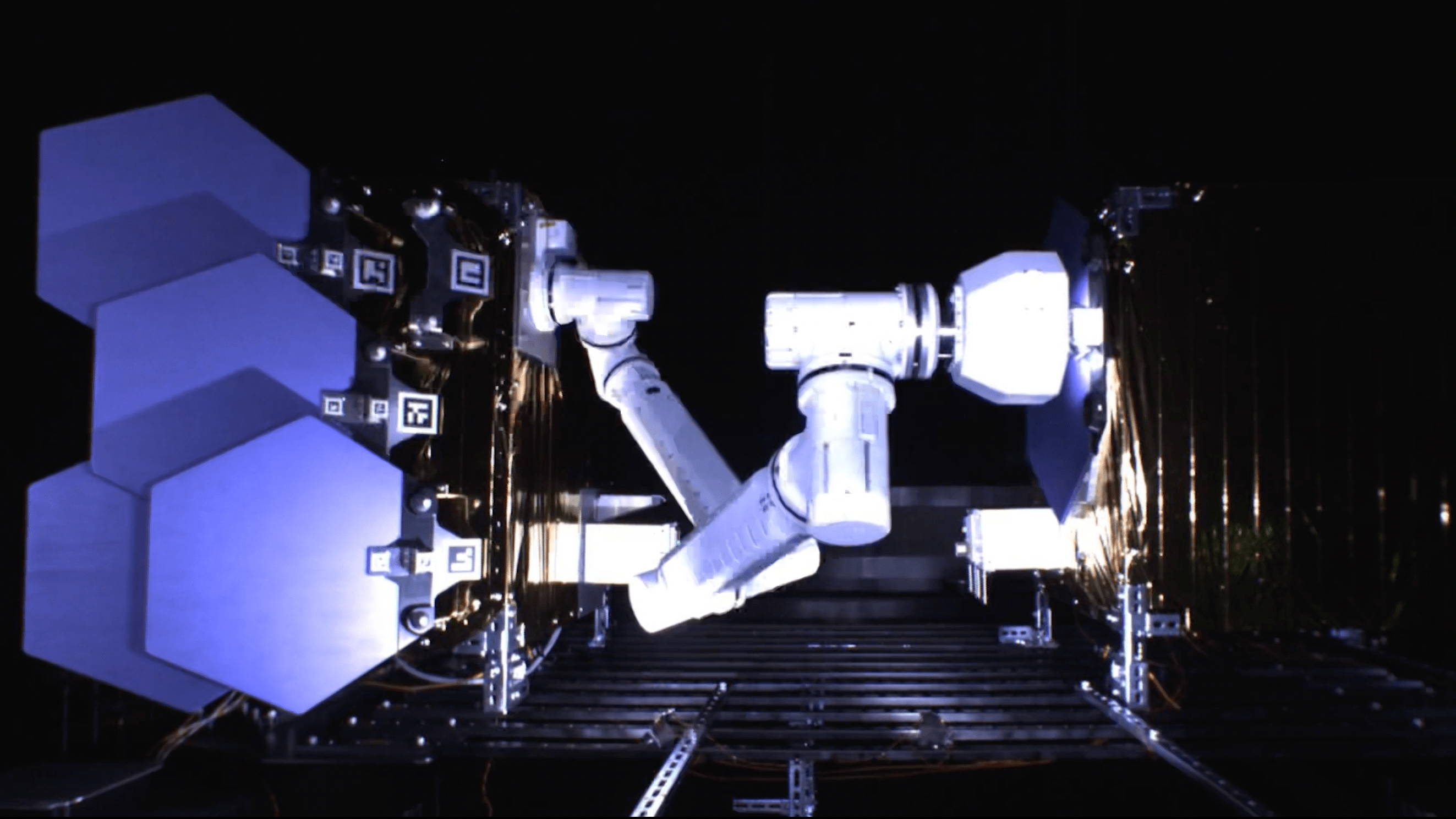
Demonstration of ISAM work in JAXA’s large space chamber
GITAI has Every Key Technology
GITAI’s development process is characterized by its flexibility to meet various customer needs in a short lead time. This is realized by GITAI’s unique development strategy, where all the core technology required to develop a space robot including mechatronics, electronics, and software are developed in-house, and all the engineers work side by side in the agile development process.
Given the uncertainties and constantly changing environment, design details are subject to change as a project evolves. GITAI’s vertically integrated and agile development style enables us to flexibly meet customer needs/requests and mitigate delay risk during the development phase.
In fact, GITAI completed technology demonstrations inside the Internal Space Station(ISS), and achieved NASA’s Technology Readiness Level (TRL) 7 (confirmation of the feasibility of the technology as a system in space) in less than 18 months from start of the S1 project.
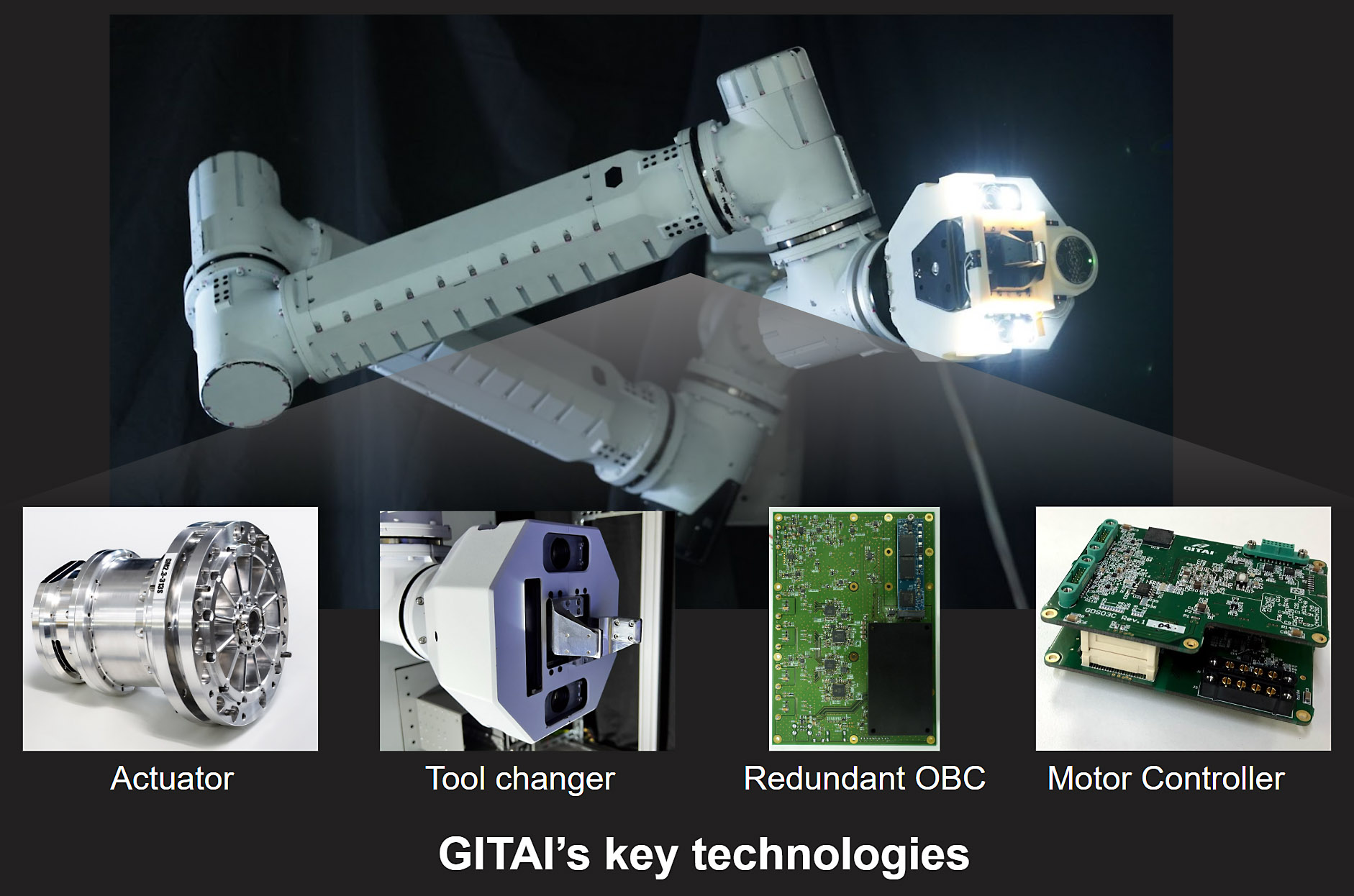
KEY TECHNOLOGIES
Tool Changer
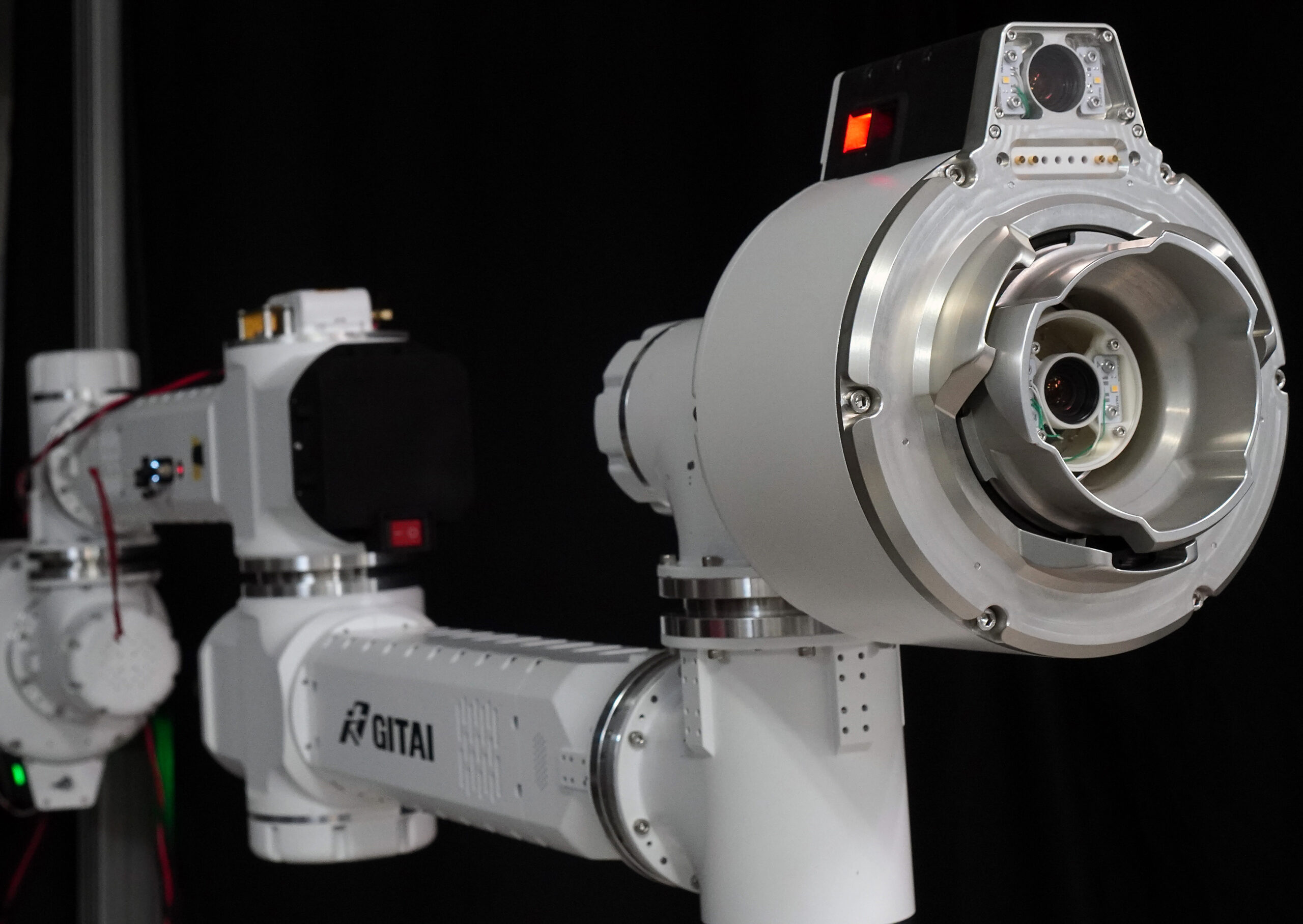
GITAI’s proprietary tool changer enables the robotic arm to conduct a variety of general-purpose tasks, such as docking spacecraft, manipulating payload, and inspect & repair, with high precision. When mated with an end-effector, the tool changer provides mechanical connections, power coupling, and data communication. Here are examples of tools.
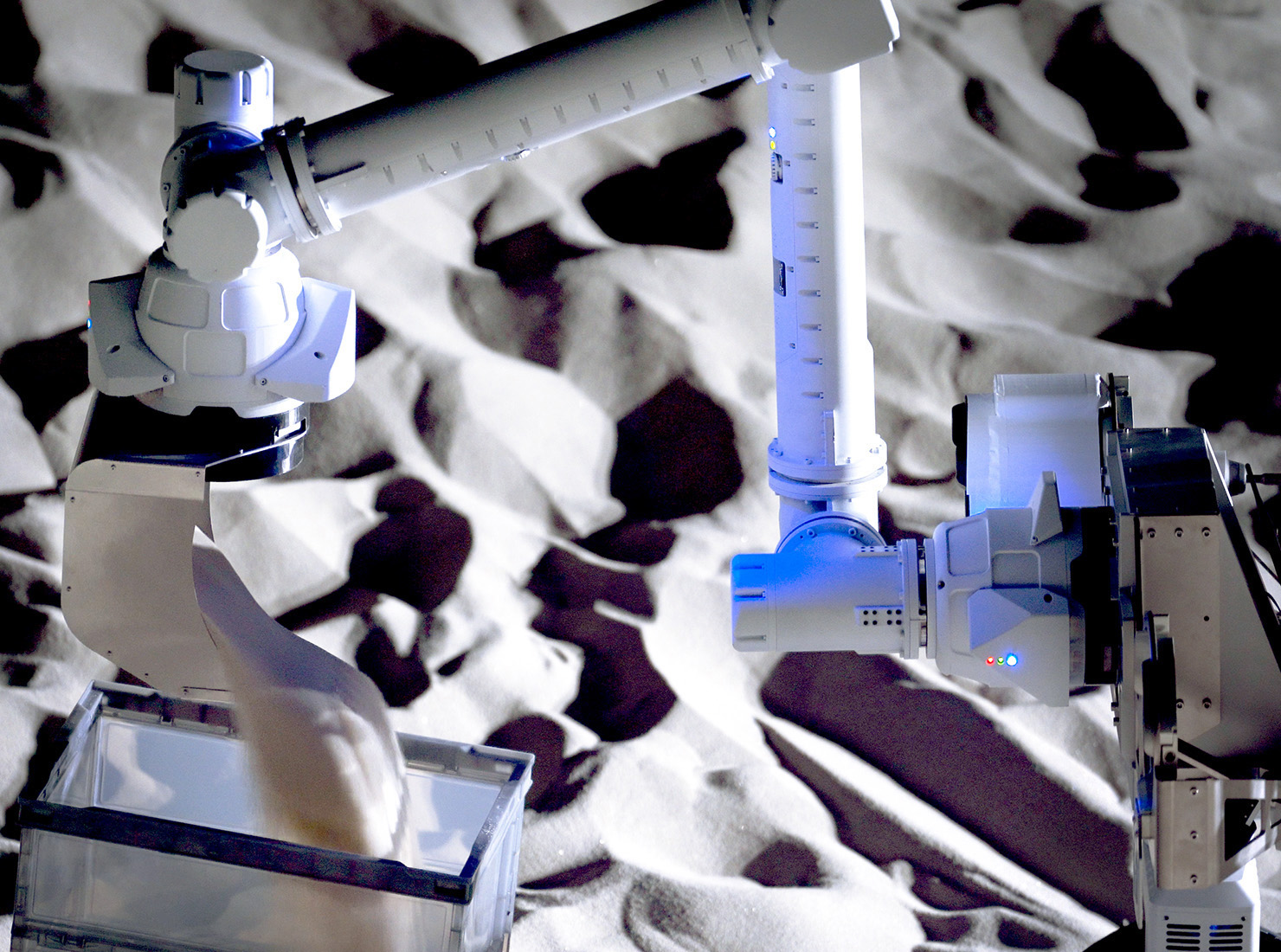
Backhoe tool
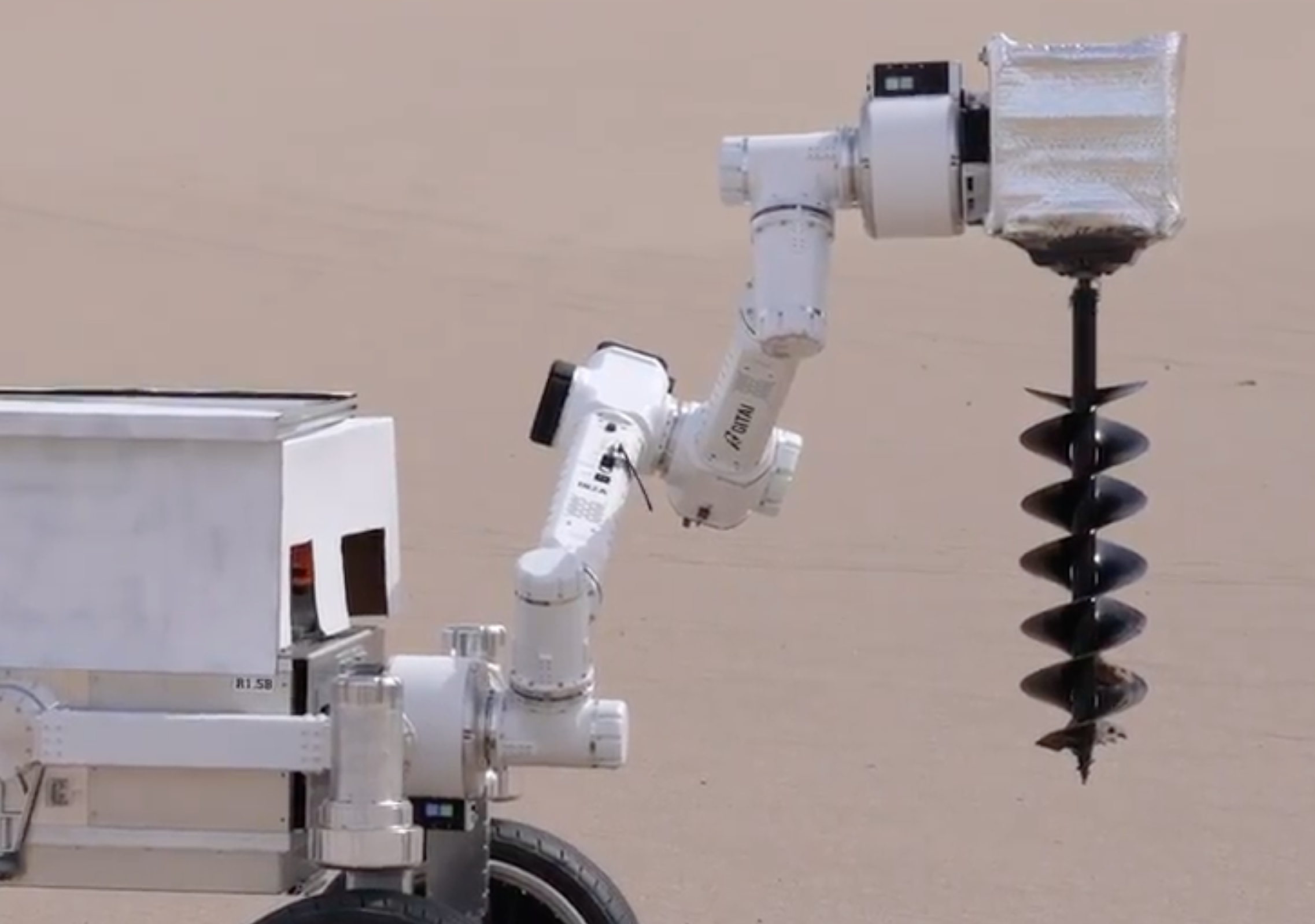
Drill tool
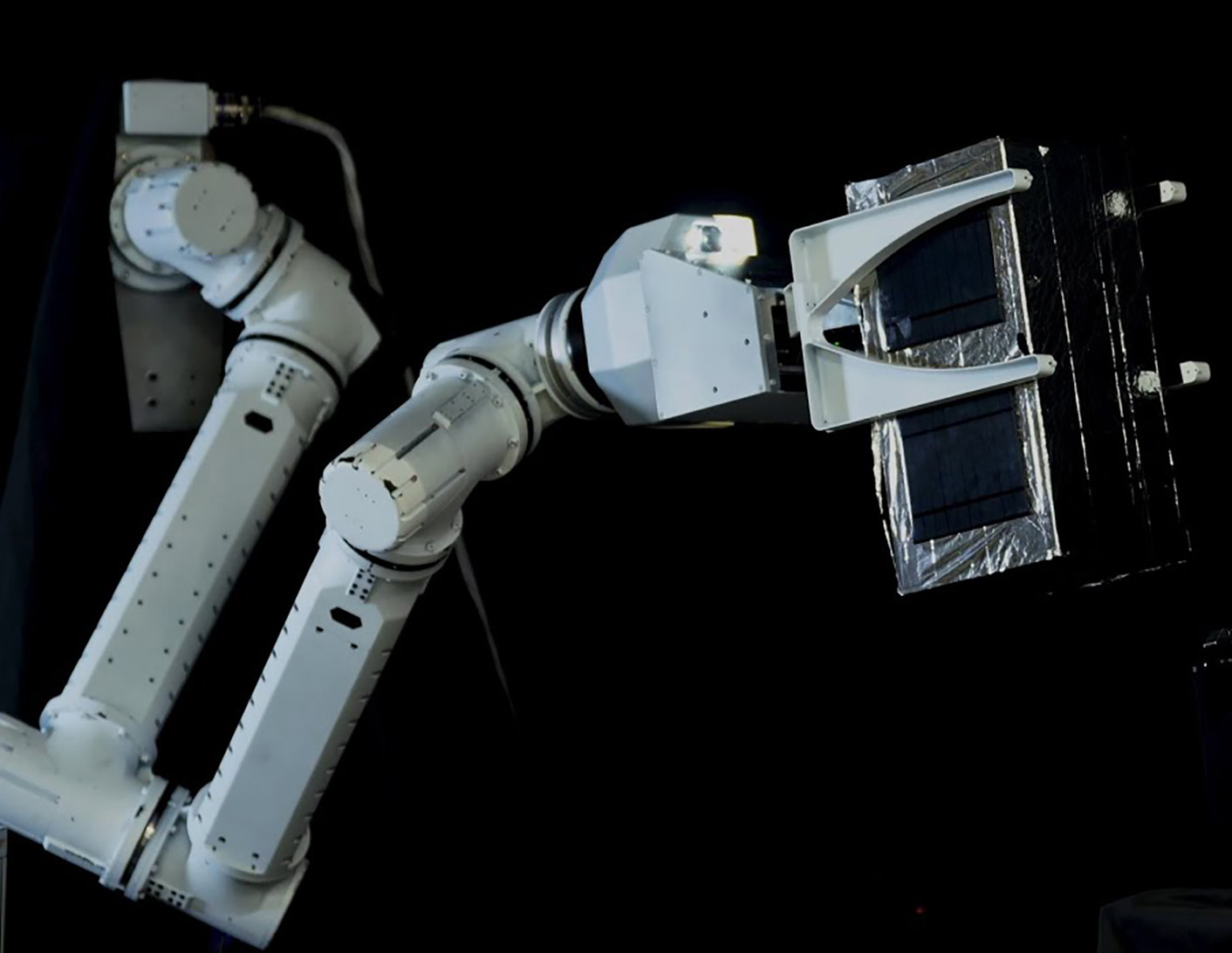
Big claw tool
Gallery