Space Station Support
Space-Proven GITAI Robotic Arms
GITAI provides Intervehicular Robots(IVR) & Extravehicular Robots(EVR) services for the International Space Station (ISS) and commercial space stations in Low Earth Orbit (LEO). GITAI’s autonomous robotic arms with “grapple end-effectors” can be flexible to optimize the dexterity for required applications such as solar panel assembly, repetitive gearing, moving payload, and station modules, inspection & repairs, human Extravehicular Activities(EVA) support, and spacecraft berthing support.
Our general-purpose robots for space applications can conduct various tasks. In fact, a GITAI autonomous space robot successfully conducted a technology demonstration inside the ISS Nanoracks Bishop Airlock in October 2021, executing in-space assembly and IVA tasks. In this project, Nanoracks provided the launch opportunity, on-orbit operations, and data downlink. NASA was in charge of launching the GITAI robot to the ISS and payload installation by NASA astronauts. Below is the footage of the ISS demo.

Space Structure assembling inside the ISS
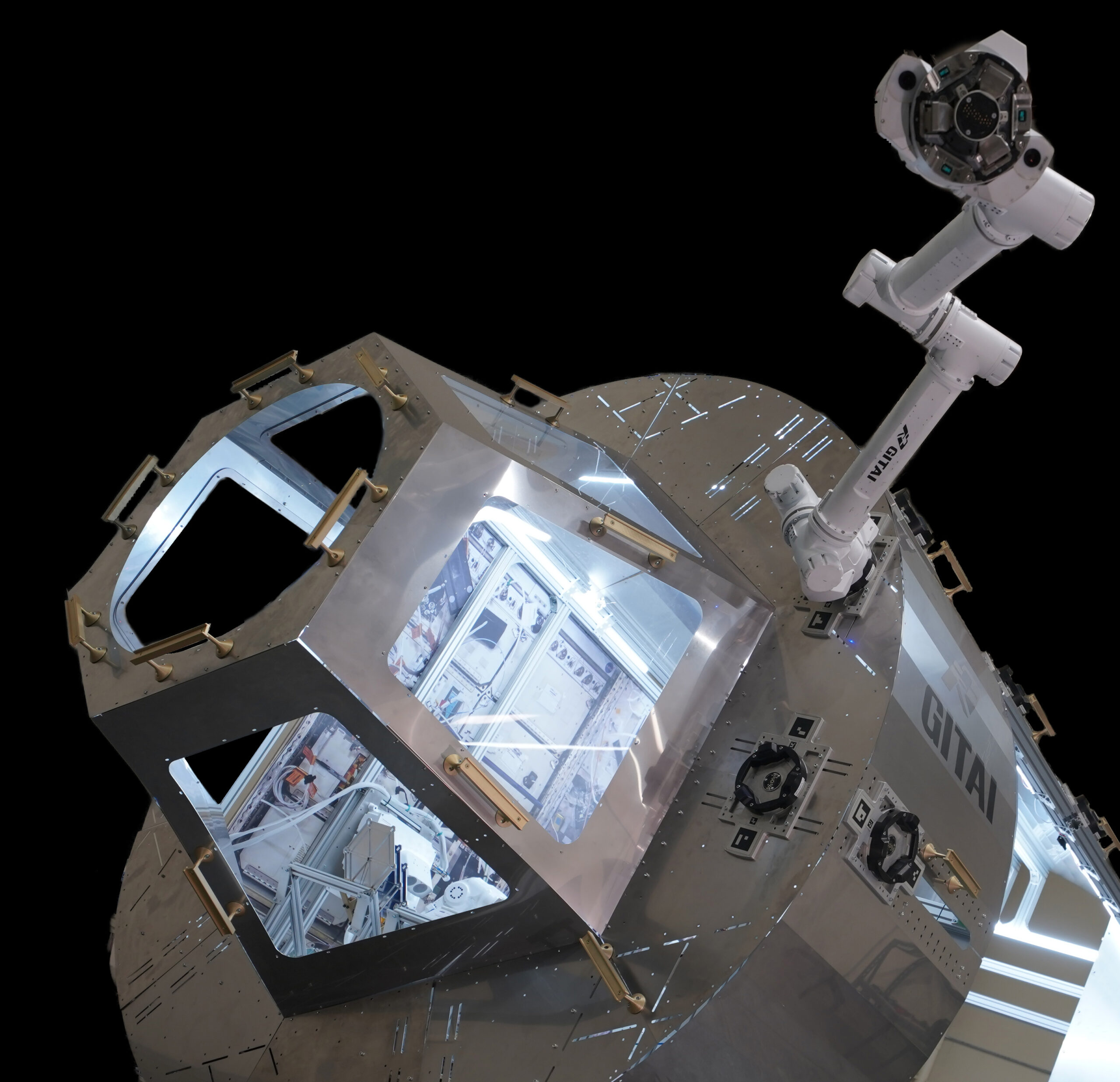
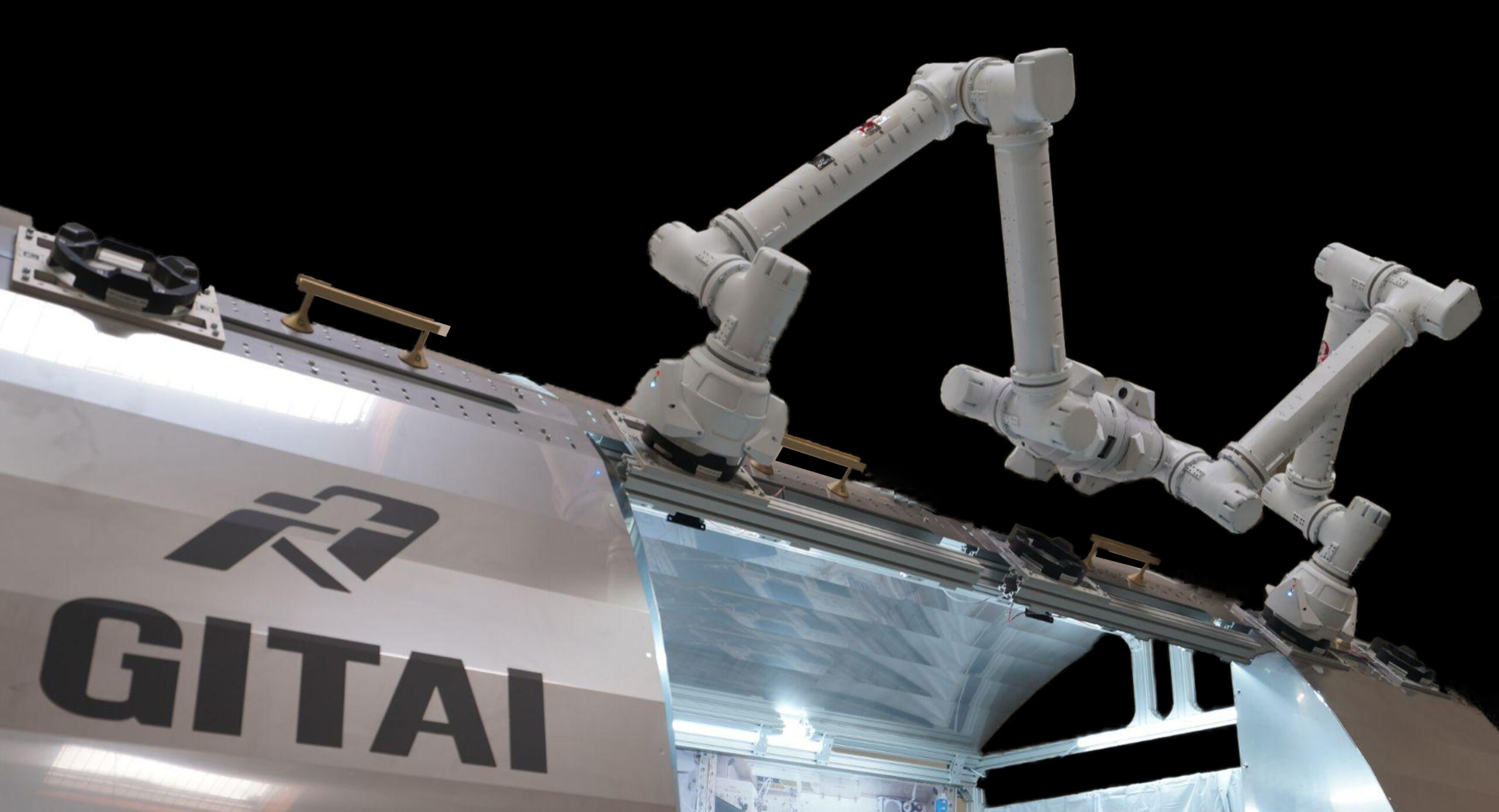
Extra-Vehicular Tech Demo outside the ISS
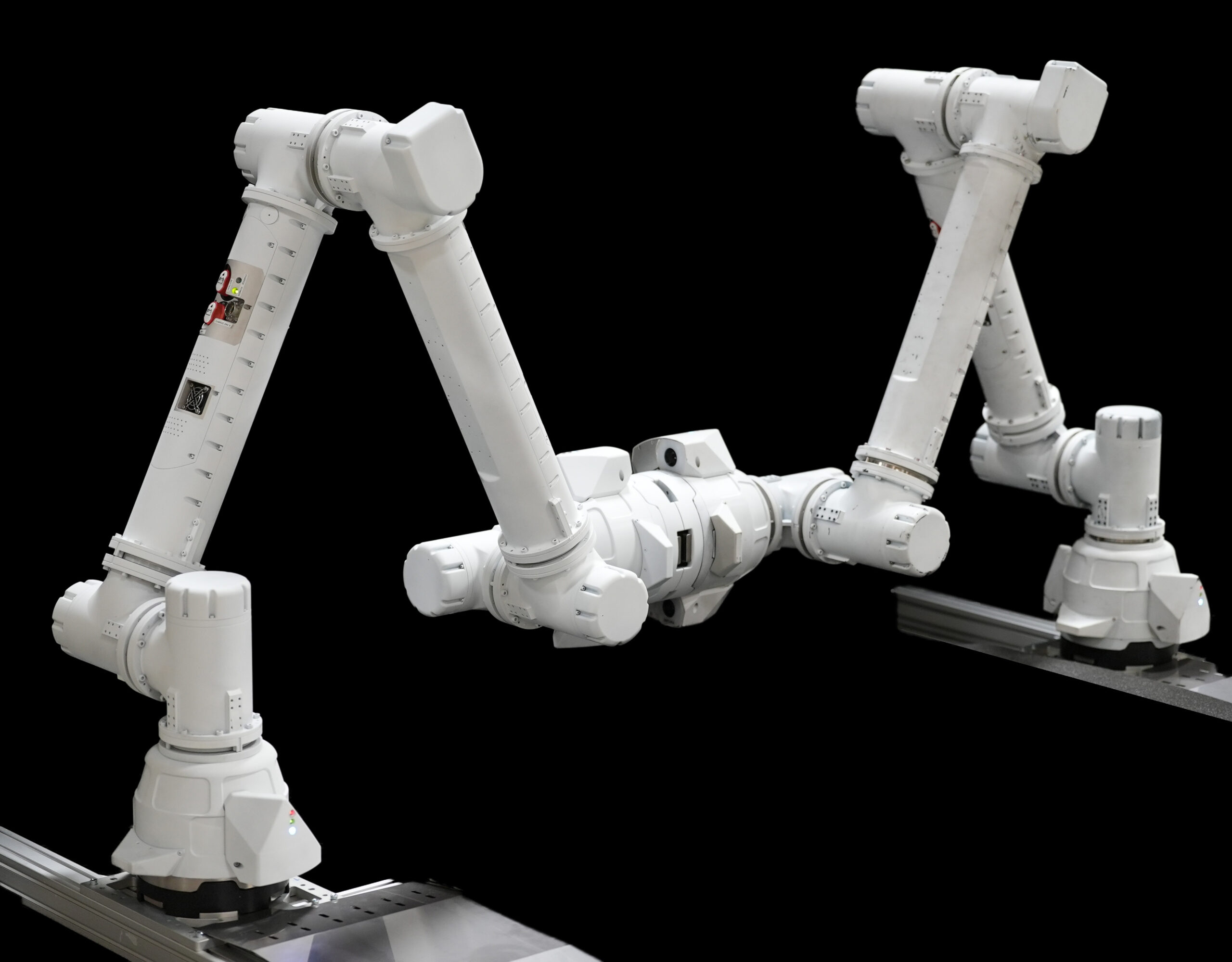
As the next challenge, GITAI’s extra-vehicular autonomous robot will be deployed on the external environment of Bishop Airlock in 2023. In this technology demonstration, GITAI’s 1.5m-long autonomous dual robotic arm system “S2” seeks to autonomously execute In-space Servicing, Assembly, and Manufacturing (ISAM) exposed to the harsh space environment, outside the ISS.
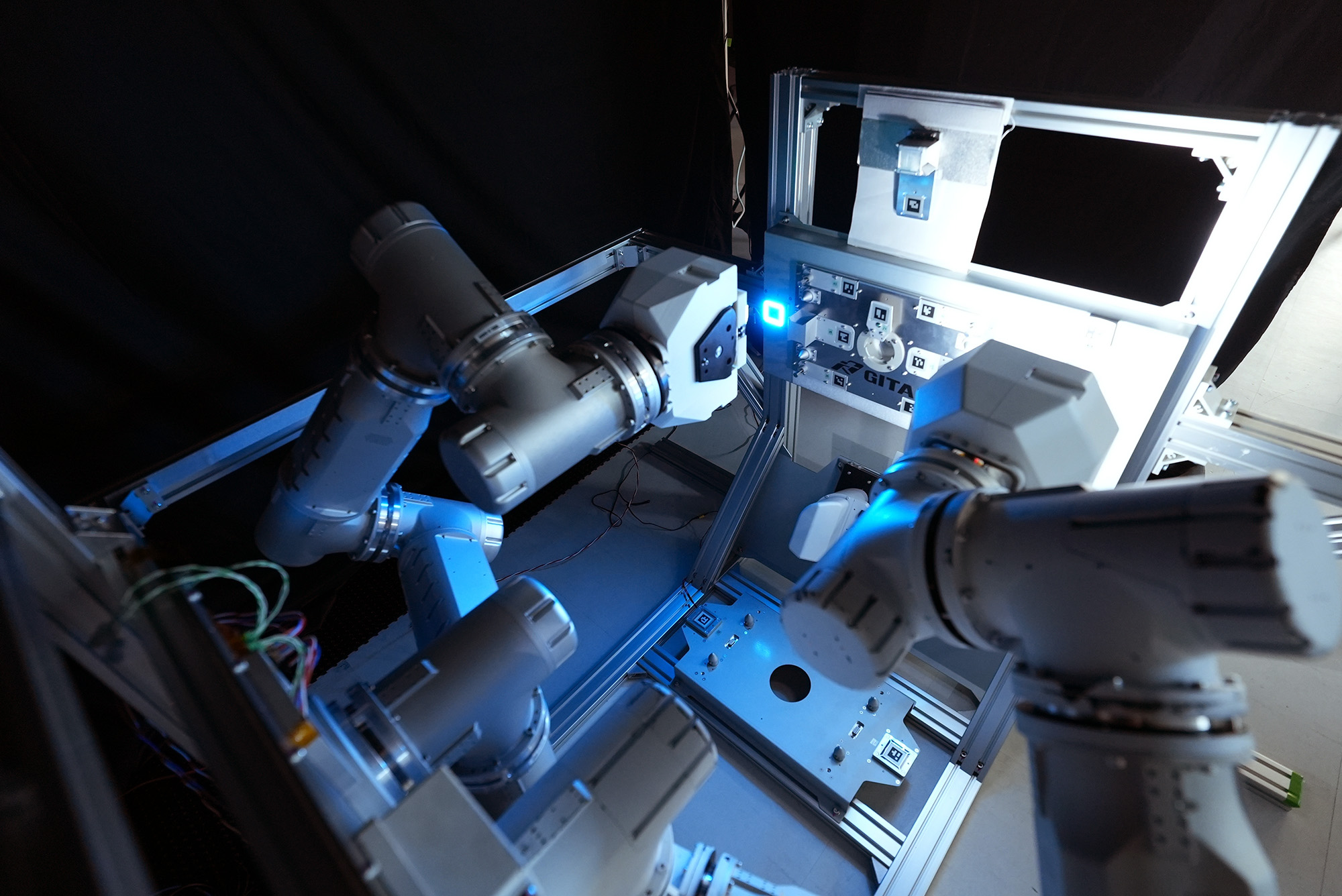
GITAI has already successfully tested this same model autonomous robot in the Japanese Aerospace Exploration Agency’s (JAXA) 8m class thermal vacuum chamber in February of 2022. By demonstrating this technology in space, GITAI aims to achieve NASA’s Technology Readiness Level 7 (confirmation of the feasibility of the technology as a system in space). The below figure shows the overview of this technology demonstration.

Seeking a longer arm? We’ve got you covered!
Thanks to our modular and adaptable design, we can accommodate customers’ requirements for arms of varying lengths. In fact, we have developed a 10-meter-long autonomous robotic arm for commercial space stations. This arm successfully completed technical demonstrations in a neutral buoyancy pool, simulating microgravity conditions, to achieve TRL 6 (System/subsystem model or prototype demonstration in a relevant environment) at Tokyo University.
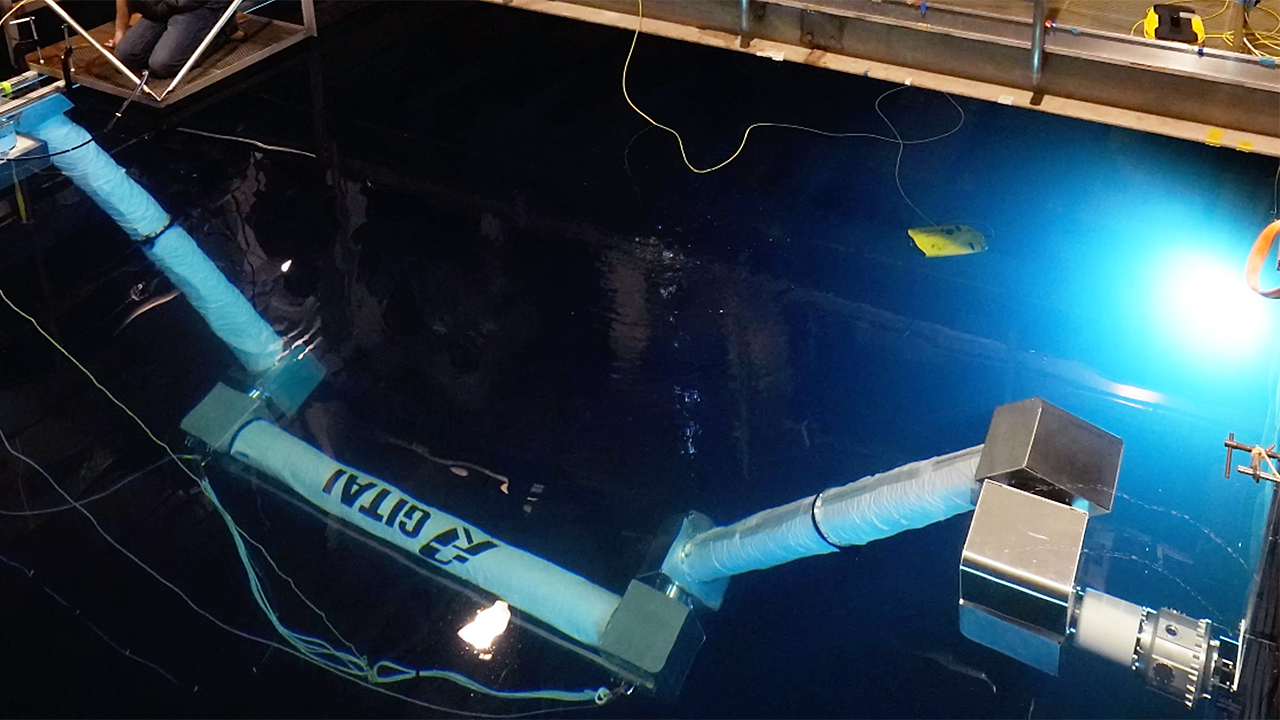
10m robotics arm in the neutral buoyancy pool
KEY TECHNOLOGIES
Inchworm Robot
Specifications
- Length: 2m
- DOF: 7 + 2
- Grapple end-effectors on both ends
- Control: autonomous / teleoperation
- More detail
Modular Design
GITAI Inchworm robot equips with Grapple end-effectors on both ends of the arm. This unique feature increases “Capability”, which enables it to connect with various tools to perform multiple tasks for various applications, and “Mobility”, which enables it to move independently.
Moreover, GITAI Inchworm Robot can connect to another Inchworm Robot when you need a longer reach.
GALLERY


Latest News