GITAI develops Lunar Robotic Rover R1 and conducts successful demonstration at JAXA’s Mock Lunar Surface Environment
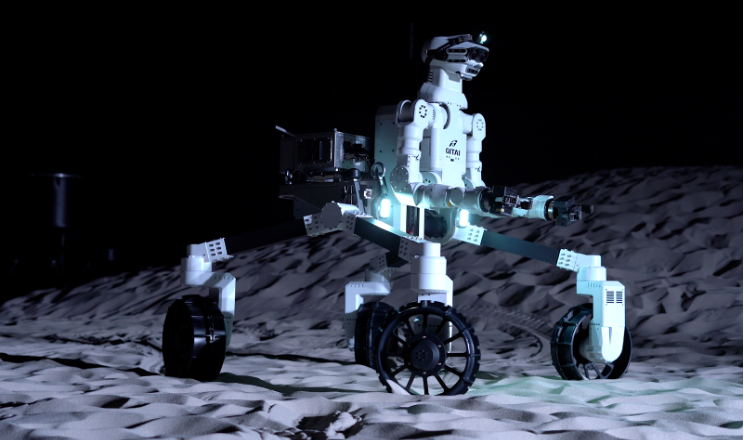
The competition for lunar resource exploration and lunar base development is accelerating mainly in the U.S. and China, and the demand for robotic labor, which is cheaper and safer than conventional human astronauts, is rapidly increasing. In response to this growing demand, GITAI has developed the advanced lunar robotic rover “R1” that can perform general-purpose tasks on the moon such as exploration, mining, inspection, maintenance, assembly, etc. In December of 2021 at the mock lunar surface environment in JAXA’s Sagamihara Campus, the GITAI lunar robotic rover R1 conducted numerous tasks and mobility operations, successfully completing all planned tests. Here we release a digest video of the demonstration.
■Ground demonstration of the GITAI lunar robotic rover “R1″ at the mock lunar surface environment in JAXA’s Sagamihara Campus
During this ground demonstration at JAXA’s mock lunar surface environment, the GITAI lunar robotic rover R1 conducted the following 4 tests and completed them all in success.
1) Drive, Mobility, and Obstacle Clearance Test
We have confirmed that the GITAI lunar robotic rover R1 is capable of driving on the mock lunar surface and has the mobility to drive over rocks a few dozen centimeters in size. Owing to the feet (wheels) with individual omni-directional steering, we confirmed that the R1 possesses the ability to move and clear obstacles in any direction.
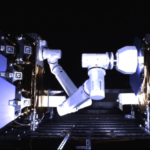
2) Solar Panel Assembly Test
We have conducted a series of activities that are necessary to assemble complex structures (solar panels, communication antennas, etc.) on the moon, which will be critical infrastructure for lunar bases that NASA envisions. Activities such as the GITAI lunar robotic rover R1 removing solar panel parts from a container, moving to a point of interest, conducting a series of tasks to assemble a solar panel on the mock lunar surface, and all activities were completed successfully.
3) Lunar Resource Extraction Test
In response to the strong interest that NASA and the US space industry is showing for lunar resource extraction, we have conducted a group of tasks to collect regolith from the lunar surface. Tasks include the GITAI lunar robotic rover R1 removing necessary tools from a container, moving to a point of interest, collecting lunar samples and storing it, returning all equipment into the container and locking it up, and all tasks were completed in success.
4) Slope (Hill) Climbing Test
The GITAI lunar robotic rover R1 has proven that it has the driving performance to climb a sandy slope of 15-20 degrees on the mock lunar surface.
GITAI will continue to improve the versatility of its general-purpose robots and compatibility to the lunar surface environment, in order to conduct a technology demonstration on the moon in the mid-2020s.
■GITAI’s Mission![]()
GITAI is a space robotics startup that aims to provide an inexpensive and safe means of working in space.
In 2040, GITAI will be an equal partner with the world’s leading space launch companies, providing inexpensive and safe labor to build cities on the Moon and Mars, and space colonies.
They provide the transportation; we provide the work.
They lower the cost of transportation; we lower the cost of work.
■About GITAI
GITAI is developing a general-purpose work robot for space use that can perform the following tasks inexpensively and safely.
1) IVA and EVA (Extra-Vehicular Activity) tasks on space stations
2) Docking, mission extension, repair, and maintenance work for on-orbit servicing (life extension to satellite / space debris removal)
3) Various tasks for lunar exploration and lunar base construction
GITAI is planning to perform a technical demonstration inside the ISS (International Space Station) scheduled for 2021 summer.
Company: GITAI Japan, Inc. (Japan HQ) / GITAI USA Inc. (US subsidiary)
CEO: Mr. Sho Nakanose
URL:https://gitai.tech/en/
Inquiries: info@gitai.tech
Official Facebook Page: https://www.facebook.com/GITAI-1515952648445089/
Official Twitter Account: https://twitter.com/GITAI64818084