GITAI Developing Robotic Arm for Toyota’s Manned Pressurized Lunar Rover

GITAI Japan, Inc. (GITAI), developing general-purpose robots for space applications, has tied a joint research contract on June 25, 2021, with Toyota Motor Corporation (Toyota) for joint R&D of a robotic arm for the “LUNAR CRUISER”, the manned pressurized rover mobility platform that Toyota and Japan Aerospace Exploration Agency (JAXA”) are developing for the surface of the moon. Based on this joint research contract, GITAI has developed a bread board model (BBM) of the robotic arm and are proud to deliver the initial release of the prototype.
In order to realize a robot that can conduct multiple tasks on the surface of the moon such as exploration, inspection, and maintenance, it will need to have the “Capability” to execute various operations, and the “Mobility” to cover the large area where the tasks are dispersed. With this in mind, GITAI is developing a dual grapple end effector* ended robotic arm that possesses the desired “Capability” & “Mobility”, and a grapple fixture* that can be applied to any surface, tool, and end-effector.
* grapple end effector / grapple fixture: the interfaces that enables the end of the robotic arm to be interchangeable.
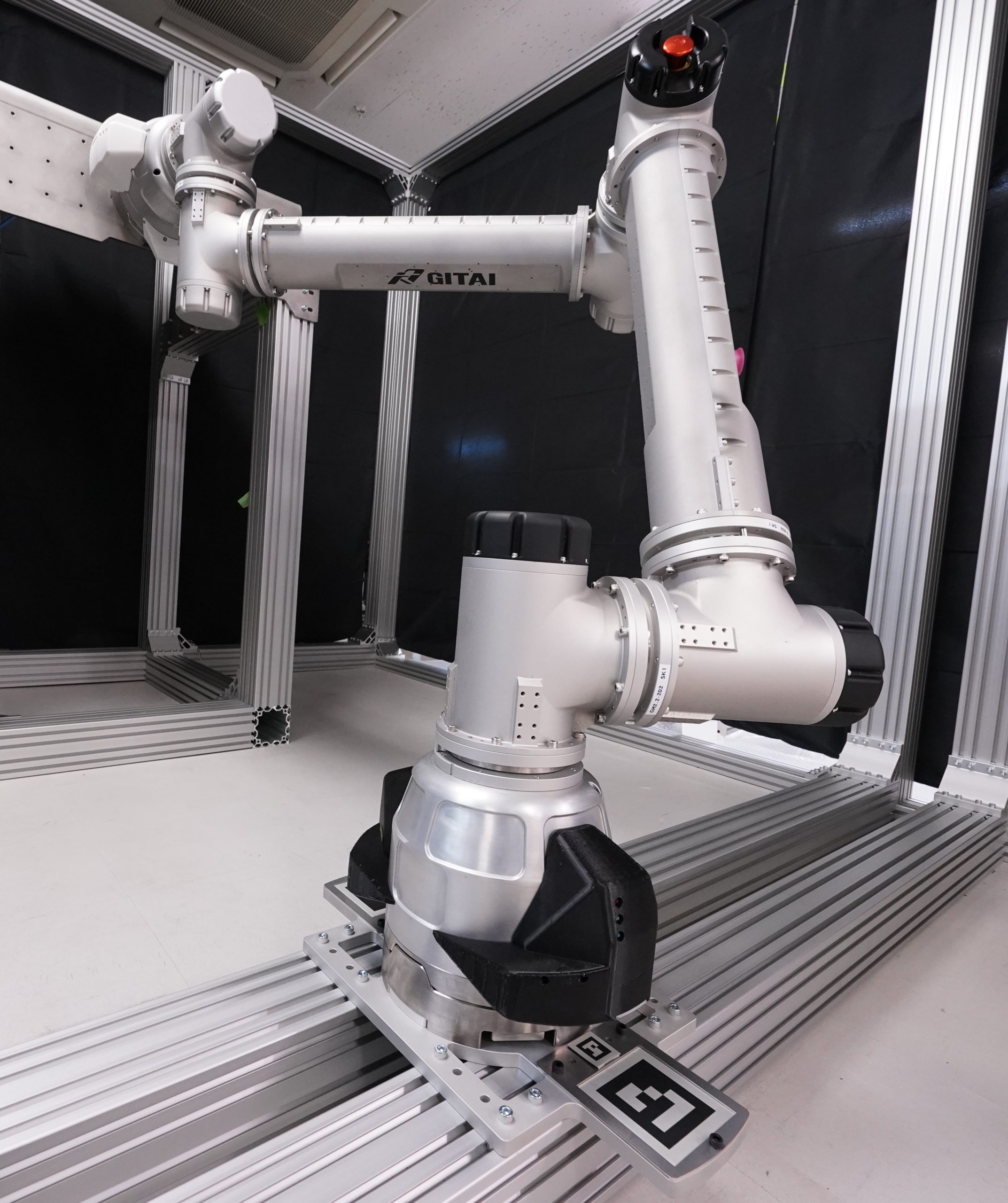
■BBM of GITAI developed robotic arm
※The robotic arm equipped with the GITAI developed grapple end effector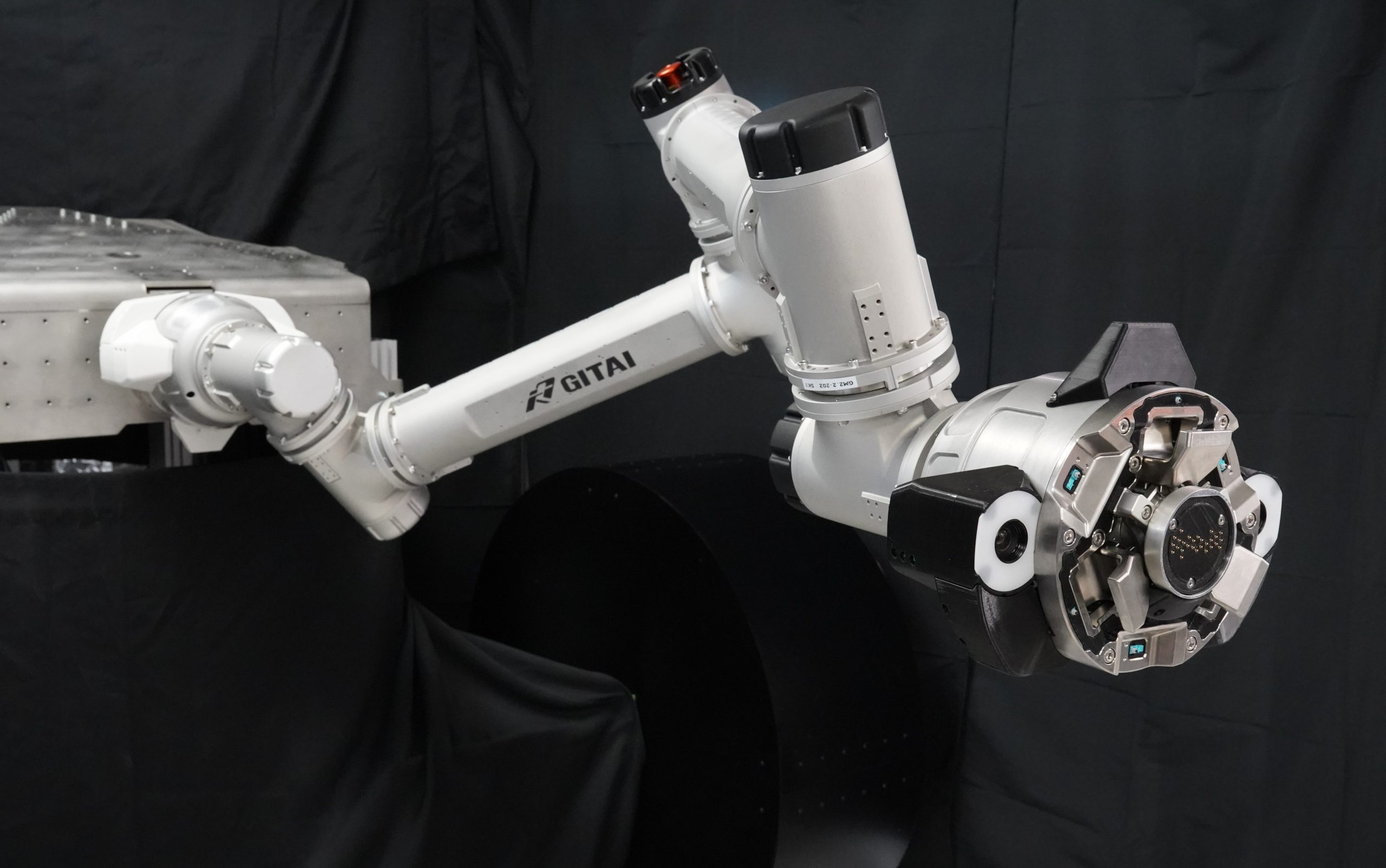
■BBM of GITAI developed grapple end effector and grapple fixture
※grapple end effector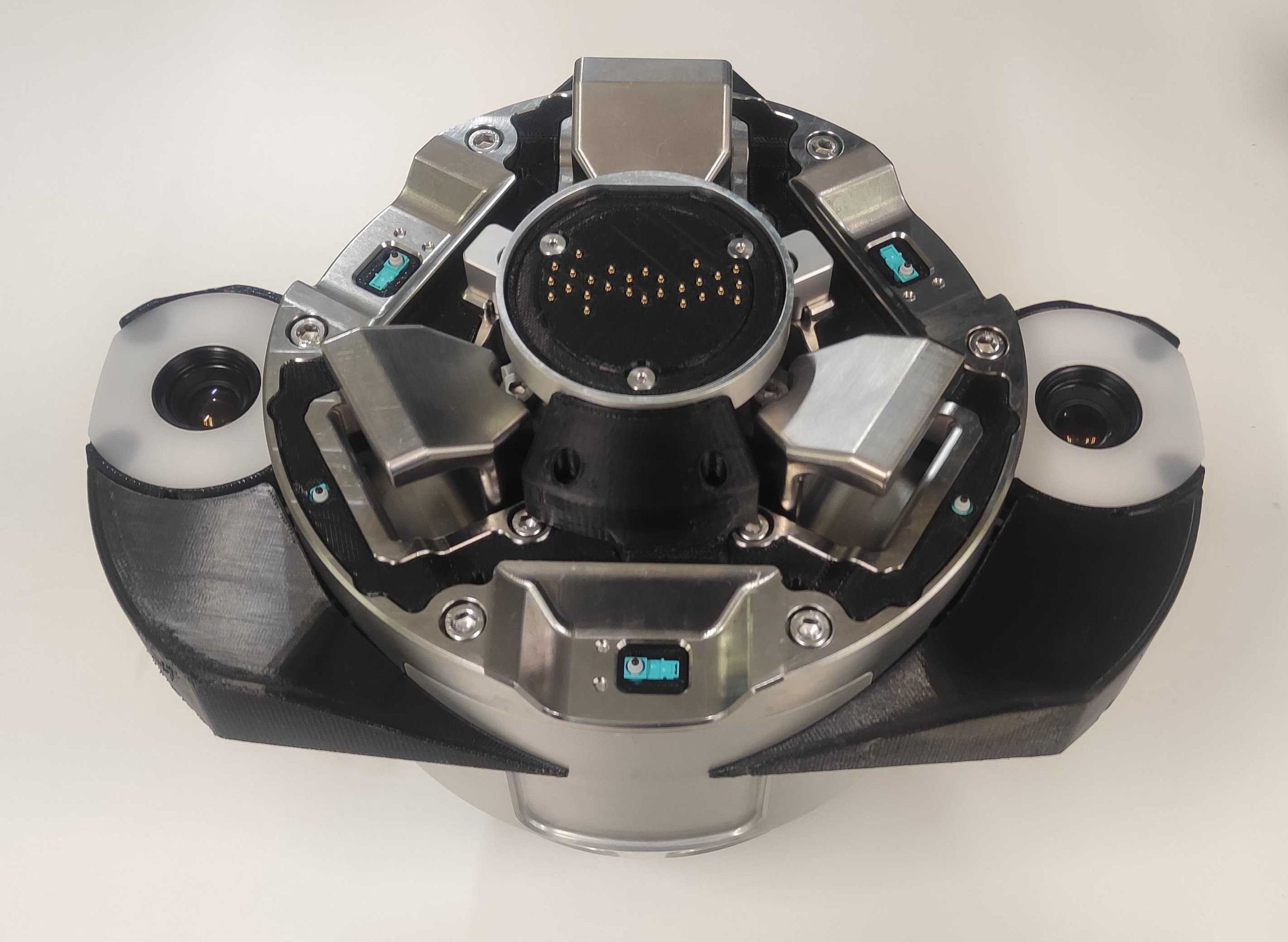
※grapple fixture
■Realizing the “Capability” to conduct various tasks on the moon
※Recognition of the grapple fixture by the robot arm’s hand camera and fitting of the grapple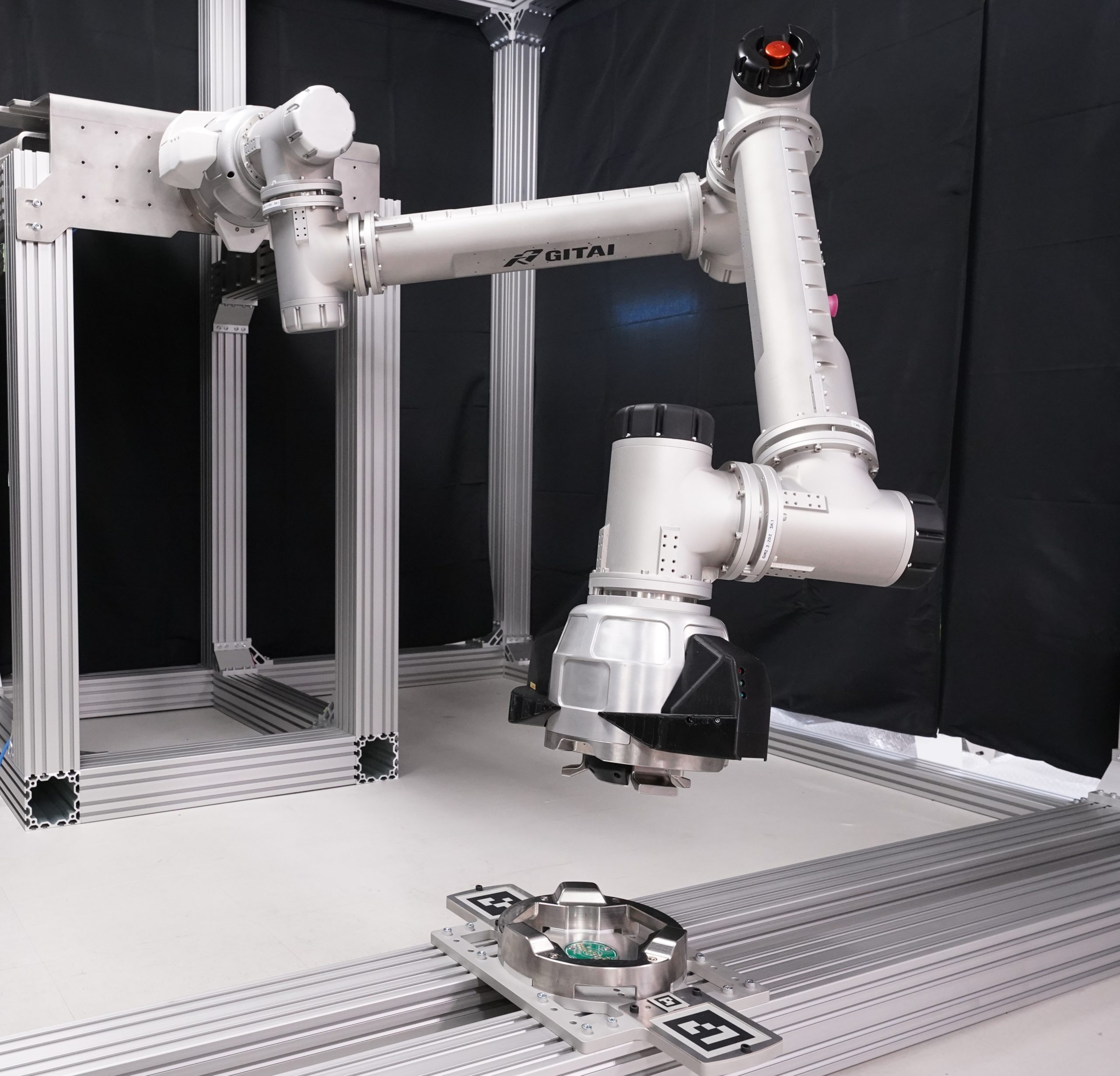
The GITAI developed grapple end effector has mechanical latches that enables it to mate with the grapple fixture. The grapple fixture can be applied to any surface, tool, and end effector. When the grapple end effector and grapple fixture are mated, a mechanical, power, and communication link is established that enables the end effector tool to be manipulated. With this, a single robotic arm will be able to utilize multiple tools and end effectors which results in realizing the desired “Capability” to conduct various tasks.
■Realizing the “Mobility” to conduct tasks dispersed over a large area
※The robot arm moves by mating with a grapple fixture installed on the floor or wall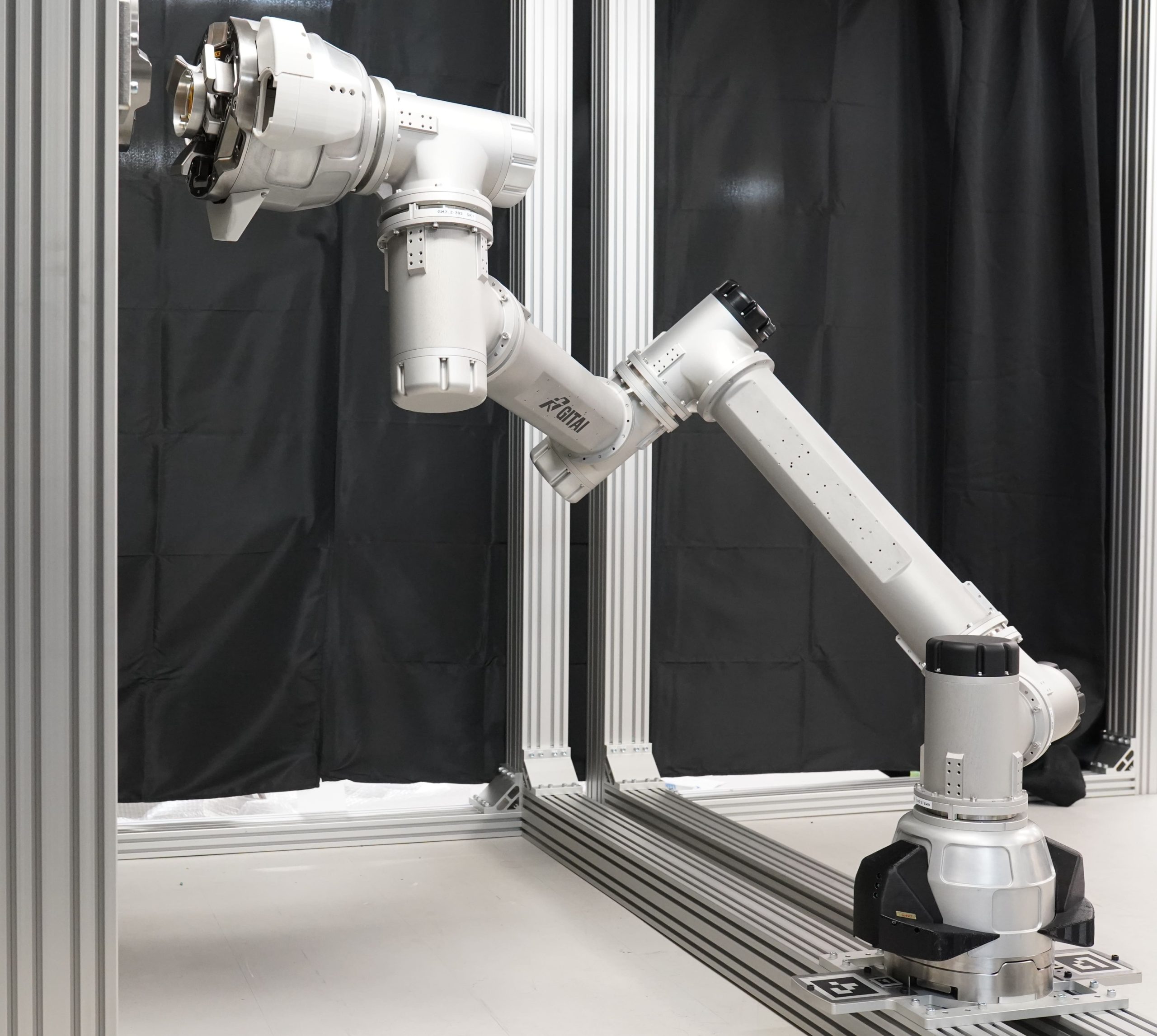
GITAI is developing a robotic arm with grapple end effectors on both ends, enabling it to move around the rover equipped with grapple fixtures which the arm can latch on to. If the grapple fixtures are also installed on other structures, the robotic arm will be able to move up & down and back & forth, infinitely increasing its mobility. Furthermore, adding a charging function to the grapple fixture will enable the GITAI robotic arm to recharge as it moves, realizing the “Mobility” it needs to conduct tasks dispersed over a large area.
■Further Development
Targeting to launch the manned pressurized rover to the moon in the late 2020s, GITAI and Toyota with further the R&D of the robotic arm for the “LUNAR CRUISER”. Technology developments include autonomous control to conduct multiple and a wide variety of tasks, adapting to the extremely harsh environment of the lunar surface such as small gravitational pull, vacuum, extreme temperature variation, lunar regolith, strong radiation, etc. Additionally, this GITAI-Toyota joint research has the potential to expand out to all the participating members of the Team Japan Study Session, leading to delivery of not only robotic arms on lunar rovers, but general-purpose robotic systems conducting various tasks in future moon bases and the lunar society.
■GITAI’s Mission![]()
GITAI is a space robotics startup that aims to provide an inexpensive and safe means of working in space.
In 2040, GITAI will be an equal partner with the world’s leading space launch companies, providing inexpensive and safe labor to build cities on the Moon and Mars, and space colonies.
They provide the transportation; we provide the work.
They lower the cost of transportation; we lower the cost of work.
■About GITAI
GITAI is developing a general-purpose work robot for space use that can perform the following tasks inexpensively and safely.
1) EVA (Extra-Vehicular Activity) tasks on space stations
2) Docking, mission extension, repair, and maintenance work for on-orbit servicing (life extension to satellite / space debris removal)
3) Various tasks for lunar exploration and lunar base construction
GITAI is planning to perform a technical demonstration inside the ISS (International Space Station) scheduled for 2021 summer.
Company: GITAI Japan, Inc. (Japan HQ) / GITAI USA Inc. (US subsidiary)
CEO: Mr. Sho Nakanose
URL:https://gitai.tech/en/
Inquiries: info@gitai.tech
Official Facebook Page: https://www.facebook.com/GITAI-1515952648445089/
Official Twitter Account: https://twitter.com/GITAI64818084