SpaceX Dragon spacecraft carrying the GITAI robot successfully launches and arrives at the ISS

GITAI Japan, Inc. (Ota-ku, Tokyo, CEO: Mr. Sho Nakanose), developing versatile robots that conduct tasks in space, is pleased to announce the successful launch of the SpaceX cargo Dragon spacecraft carrying the GITAI S1 robot on August 29 at 3:14 AM EDT.
The Dragon also successfully docked with the ISS on Monday, August 30 at approximately 10:30 AM EDT, and the GITAI S1 robot safely arrived to the ISS.
The technology demonstration of the GITAI S1 robot performing general-purpose tasks on-board the ISS is scheduled for around October this year. (*schedule under coordinations by NASA)
■Launch of SpaceX CRS-23 Rocket
■Summary of the GITAI technical demonstration on NASA’s official website
23rd SpaceX Commercial Resupply Mission Launches Bone, Plant, and Materials Studies to International Space Station
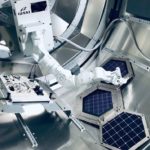
■ISS onboard demonstration to be conducted by GITAI
In 2021, space robotics start-up GITAI, in collaboration with Nanoracks, will conduct a technical demonstration of a GITAI robot executing versatile tasks inside the Nanoracks Bishop Airlock installed on Node 3 of the ISS. GITAI is responsible for the development of the S1 space robotic arm, Nanoracks is providing the launch opportunity, on-orbit operations, and data downlink. NASA is in charge of transporting the S1 space robotic arm to the ISS and installing it (by NASA astronauts) inside the Bishop Airlock.
https://gitai.tech/en/2020/09/10/gitai-nanoracks-en/
In this technical demonstration, GITAI’s space robot “S1” will be installed inside the ISS Bishop Airlock to conduct two experiments: IVA (Intra-Vehicular Activity) tasks such as switch and cable operations, and assembly of structures and panels to demonstrate its capability for ISA (In-Space Assembly). All operations conducted by the S1 GITAI robotic arm will be autonomous, followed by some teleoperations from Nanoracks’ mission control center in Houston.
※Ground experiment video of the GITAI S1 robot conducting an ISA task (recorded in the GITAI Tokyo office)
Through this technical demonstration, GITAI will acquire the technology, know-how, and experience necessary to develop a robot that can conduct versatile tasks in space. All this will be applied to future development of robots working in the harsh space environment that can carry out docking, repair, and maintenance tasks for On-Orbit Servicing (OOS), and conduct various tasks for lunar exploration and lunar base construction.
■GITAI’s Mission![]()
GITAI is a space robotics startup that aims to provide an inexpensive and safe means of working in space.
In 2040, GITAI will be an equal partner with the world’s leading space launch companies, providing inexpensive and safe labor to build cities on the Moon and Mars, and space colonies.
They provide the transportation; we provide the work.
They lower the cost of transportation; we lower the cost of work.
■About GITAI
GITAI is developing a general-purpose work robot for space use that can perform the following tasks inexpensively and safely.
1) EVA (Extra-Vehicular Activity) tasks on space stations
2) Docking, mission extension, repair, and maintenance work for on-orbit servicing (life extension to satellite / space debris removal)
3) Various tasks for lunar exploration and lunar base construction
Company: GITAI Japan, Inc. (Japan HQ) / GITAI USA Inc. (US subsidiary)
CEO: Mr. Sho Nakanose
URL:https://gitai.tech/en/
Inquiries: info@gitai.tech
Official Facebook Page: https://www.facebook.com/GITAI-1515952648445089/
Official Twitter Account: https://twitter.com/GITAI64818084