S1
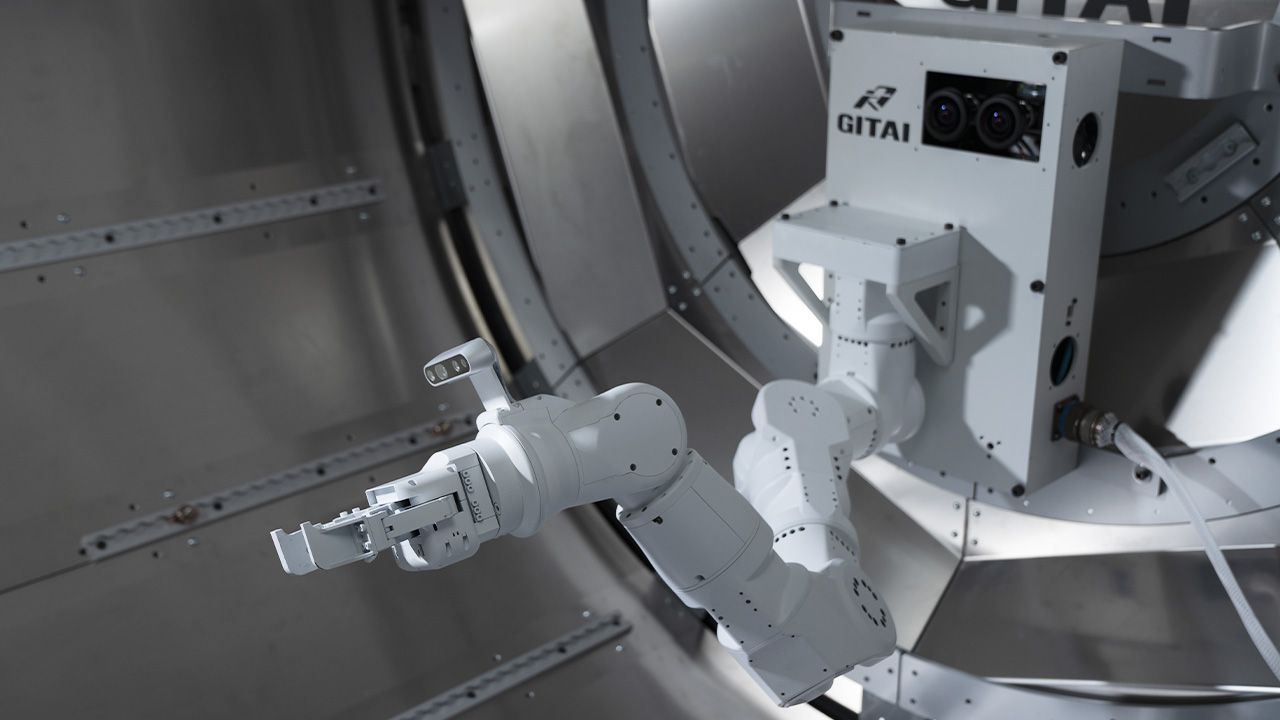
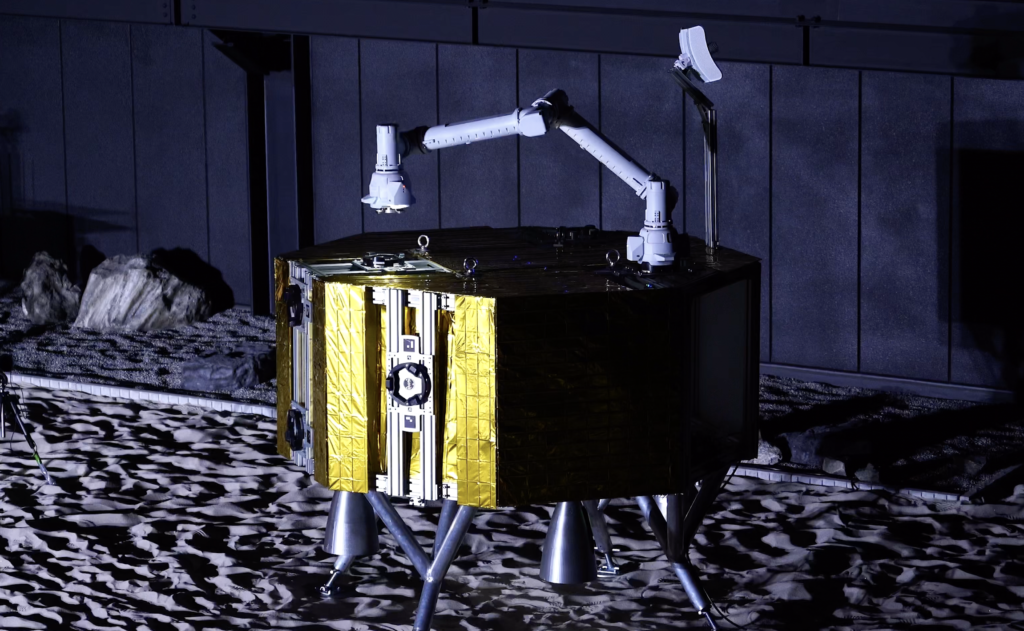
The task specific space robot. A robot designed for the automation of specific tasks internally & externally on space stations, on-orbit servicing, and lunar base development.
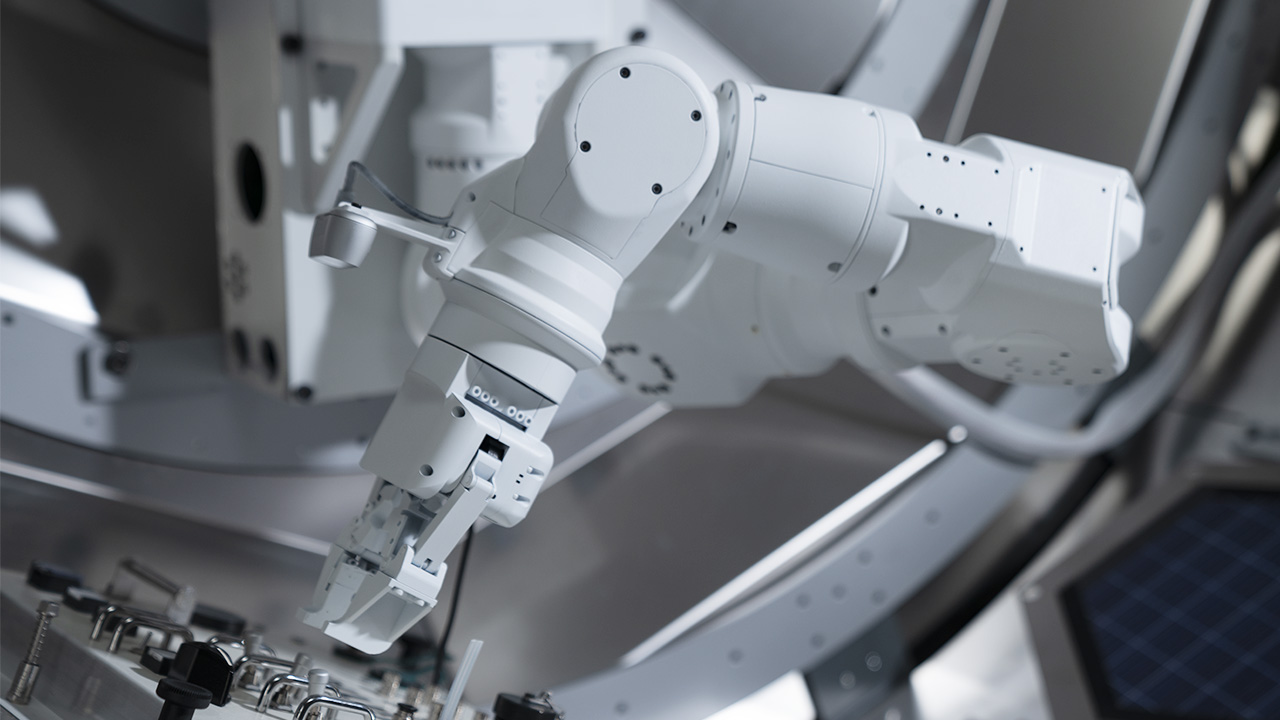
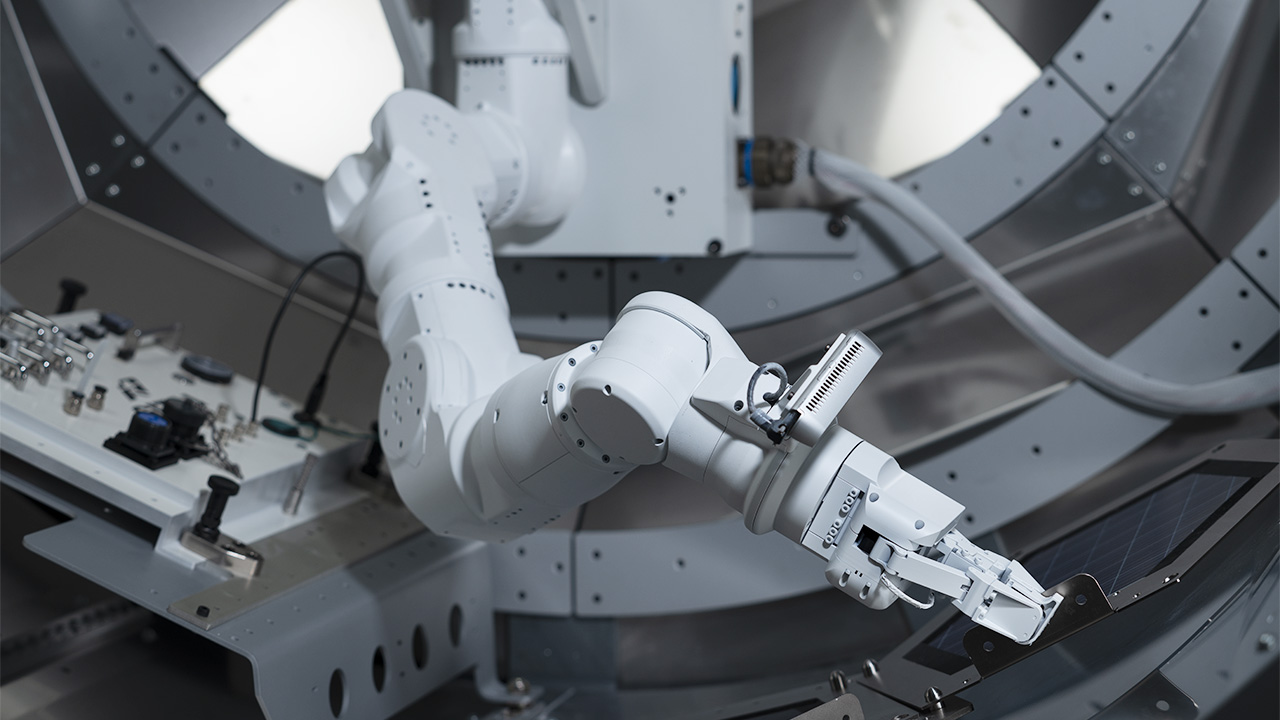
GITAI S1 is a semi-autonomous / semi-teleoperated robot designed to conduct specified tasks internally & externally on space stations, on-orbit servicing, and lunar base development.
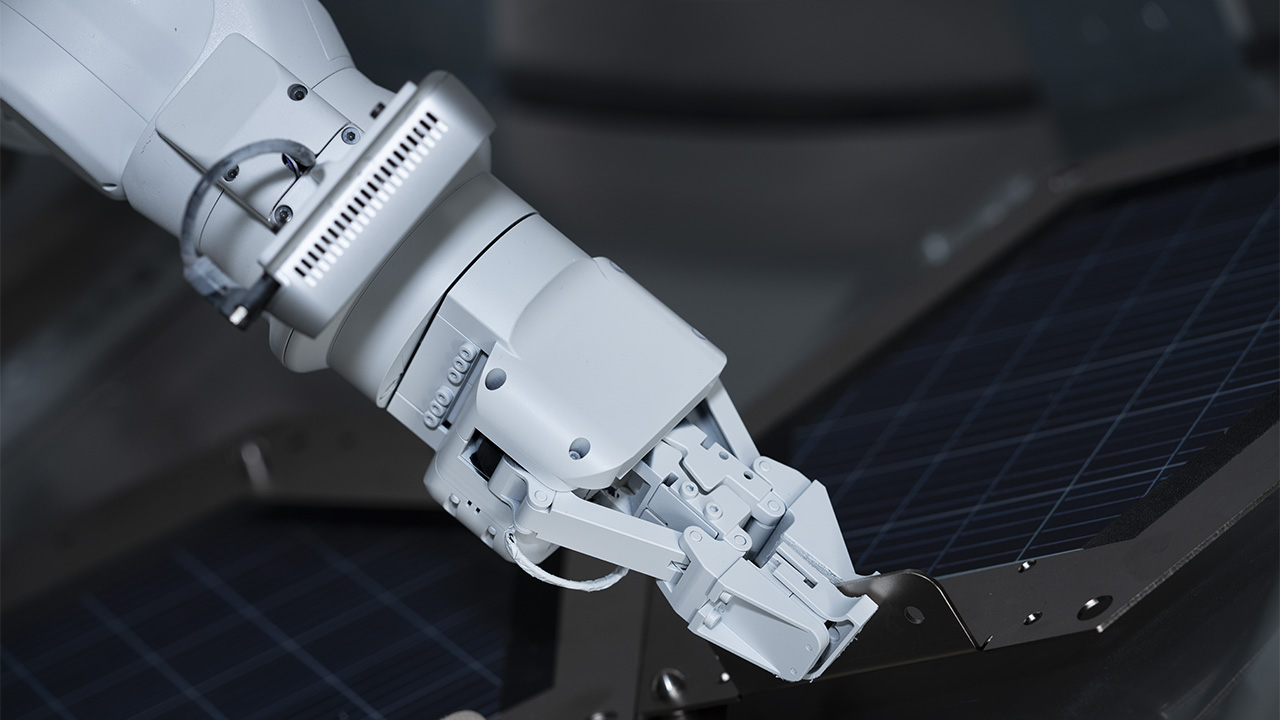
By combining autonomous control via AI and teleoperations via the specially designed GITAI manipulation system “H1”, GITAI S1 on its own, possesses the capability to conduct generous-purpose tasks (manipulation of switches, tools, soft objects; conducting science experiments and assembly; high-load operations; etc.) that were extremely difficult for industrial robots such as task specific robotic arms to do.
Technical Strengths
- To be space flight qualified and proven (TRL 9 expected in May 2021)
- High performance motor driver with direct-to-frame heat diffusion
- High reliability system internal communication through optical fibers
- High reliability data communication over low-fidelity and high-latency network
- Supervised and shared autonomy
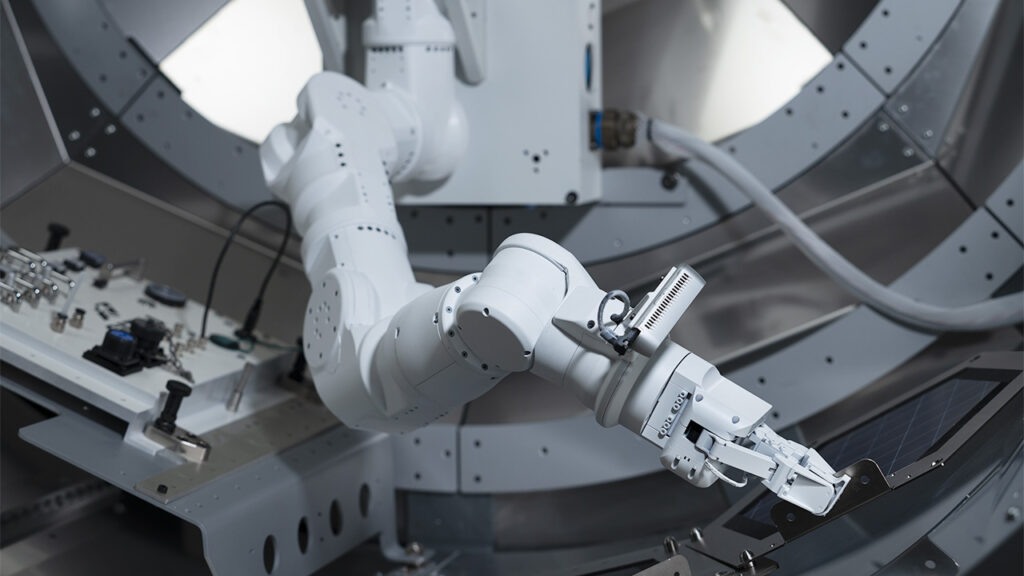

SPEC
DOF
8+1 for hand
Power
100Nm / 23.8rpm
Reach
Max:1.0m
GALLERY