G1
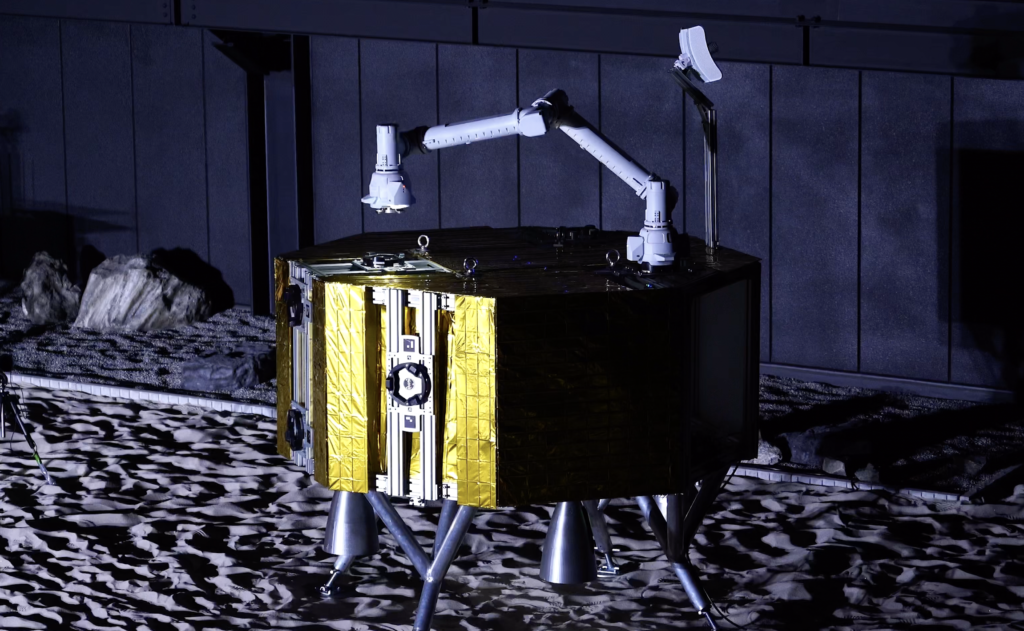
The space dedicated general-purpose robot. A robot that will enable automation of various tasks internally & externally on space stations and for lunar base development.
conduct general-purpose tasks internally & externally on space stations and for lunar base development.
By combining autonomous control via AI and teleoperations via the specially designed GITAI manipulation system “H1”, GITAI G1 on its own, possesses the capability to conduct generous-purpose tasks (manipulation of switches, tools, soft objects; conducting science experiments and assembly; high-load operations; etc.) that were considered to be extremely difficult for robots to do.
Technical Strengths
- Ultra low latency streaming of high resolution & wide FOV video
- High power actuation system for high-speed & torque motions and elastic response to external force
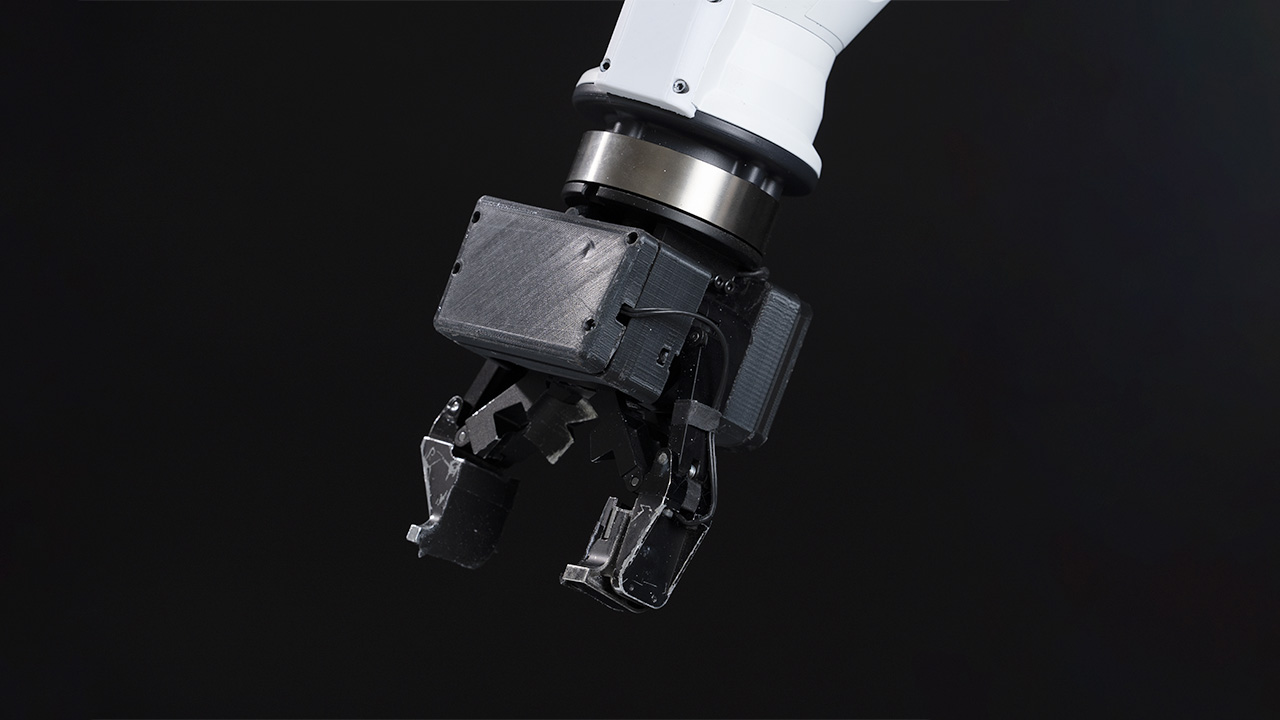
- Dual-arm manipulation
- Realtime logging & diagnostics framework for high-reliability
- Redundant joint axis configuration for broad reachability
- Omni-directional perception capability
- User interface providing intuitive control


SPEC
DOF
each arm: 8 + 1 for hand; torso: 3
Power
245Nm / 47.5rpm
Imaging
2.4k ×2.4k × 2 Color
@25fps in <10Mbps,<70msec end-to-end latency
WEIGHT
120kg
MIN HEIGHT
150cm
MIN HEIGHT
200cm
GALLERY